접촉기 제어 및 모터 보호 회로
 수행할 기능에 따라 다양한 접촉기 모터 제어 회로가 있습니다.
수행할 기능에 따라 다양한 접촉기 모터 제어 회로가 있습니다.
그림 1a는 돌이킬 수없는 마그네틱 스타터의 결합 방식을 보여줍니다.... 그 안에서 요소의 배열은 자연의 배열과 일치합니다. 즉, 스타터 상자에있는 모든 요소는 다이어그램의 왼쪽에 그룹화되어 있습니다. «시작» 및 «정지» 버튼이 있는 푸시 버튼 스테이션 다이어그램의 오른쪽에 표시됩니다.
버튼 스테이션은 일반적으로 기기에서 약간 떨어져 있습니다. 마그네틱 스타터… 모터 제어 회로의 작동 원리를 이해하기 위해 일반적으로 세부(기본) 다이어그램이 사용됩니다(그림 1.b). SB2 시작 버튼을 누르면 모터 공급 회로의 3개의 KM 접점을 포함하는 KM 접촉기 코일 회로가 닫힙니다. 이 경우 시작 버튼 SB2와 병렬로 연결된 블록 접점 KM도 닫힙니다. 이렇게 하면 SB2 버튼에서 손을 뗐을 때 KM 코일에 전원을 공급할 수 있습니다.
코일이 꺼지는 동안 SB1 버튼을 누르면 모터가 정지되고 전원(메인) 접점과 보조 접점이 해제됩니다. SB1 버튼을 놓으면 코일 KM 회로의 전원이 차단됩니다. 엔진을 다시 시작하려면 SB2 버튼을 다시 누르십시오.
이 회로는 소위 제로 보호 기능도 제공합니다. 즉, 주전원 전압이 사라지거나 공칭 전압의 50-60%로 떨어지면 KM 코일이 KM 전원 접점을 유지하지 못하고 모터가 꺼집니다. 전압이 나타나거나 공칭 값에 가까운 값으로 증가하면 마그네틱 스타터가 자발적으로 작동하지 않습니다. 켜려면 시작 버튼을 다시 눌러야 합니다.
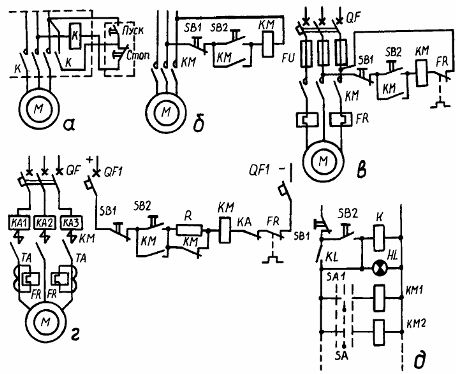
쌀. 1. 모터 제어 및 보호 체계: a — 결합 및 b — 돌이킬 수 없는 마그네틱 스타터의 세부 체계 c — 퓨즈 및 열 계전기를 통한 엔진 보호; d — 강력한 엔진 제어 스테이션의 다이어그램; d - 중간 릴레이로부터 제로 보호
권선 과열로부터 모터를 보호하는 것은 장기간의 과부하 동안 수행됩니다. 열 계전기 FR 및 큰 과부하 또는 단락에 대한 보호는 퓨즈 FU 또는 회로 차단기 QF(그림 1, c). 장기간의 과부하로부터 보호하기 위해 두 개의 열 계전기가 사용됩니다. 하나의 계전기로 퓨즈가 끊어진 경우이 계전기의 발열체가 연결된 직렬로 모터가 단상 네트워크에 연결되고 그들은 보호되지 않습니다. 이 릴레이의 차단 접점은 스타터 코일과 직렬로 연결됩니다. 그 중 하나가 열리면 SB1 버튼을 누를 때와 같이 KM 코일의 전원이 차단되고 모터가 정지합니다.
고전력 모터 제어 스테이션이 그림에 나와 있습니다. 1, d. 단락 보호는 과부하 계전기 KA1 — KA3에 의해 제공되며, 과부하 보호는 변류기를 통해 연결된 열 계전기 FR에 의해 제공됩니다. 3극 접촉기의 코일에는 직류가 공급됩니다. 회로에 포함된 후 접촉기 코일의 전류를 줄이기 위해 이전에 열린 접점 KM에 의해 단락된 추가 저항 R이 도입되었습니다.
여러 컨트롤러, 스위치 또는 기타 장치가 있는 수동 제어 회로에서 중간 릴레이는 중립 보호를 제공하는 데 사용됩니다. (그림 1, e) 제어 회로에 전압을 가하려면 SB2 버튼을 눌러 폐쇄 접점 K와 신호 램프 HL을 포함하는 중간 릴레이 K를 켜 제어 회로에 전압이 있음을 나타냅니다. . SB2 버튼에서 손을 떼면 릴레이 코일이 차단되고 SM1 컨트롤러, SM 패킷 스위치 등의 회로가 차단됩니다. 접촉기 KM1, KM2 등의 코일에 전원이 공급됩니다.
고려된 방식에서 자동 잠금 접점은 모터의 연속 작동에 필요합니다. 예를 들어 리프팅 기계에서 종종 실제로는 시작 버튼을 누를 때만 엔진이 작동하면 됩니다. 이 경우 제어 회로에 중지 버튼이 없습니다(그림 2, a). 때로는 두 가지 모드, 즉 기계를 설정할 때 짧은 시간 동안 또는 오랜 시간 동안 드라이브를 켜야 하는 경우 드라이브 작동을 보장해야 합니다. 그런 다음 버튼 SB2(그림 2.b)를 짧게 누르면 접촉기 KM의 코일이 켜지고 KM의 자동 잠금 접점이 닫히고 버튼 SB2에서 손을 떼면 모터가 작동합니다. .
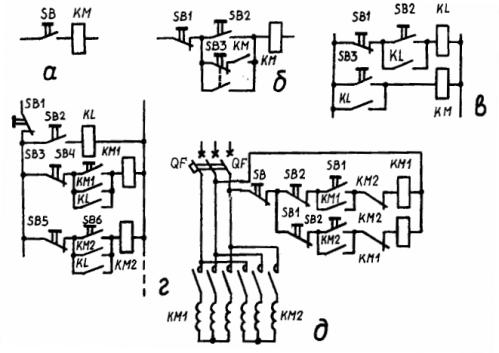
쌀. 2. 비동기 모터용 제어 회로 유형: a — 조깅 모드에서; b 및 c — 장시간 작업 및 조깅 중; d — 여러 엔진을 동시에 포함; d — 2단 모터의 무단 시동
모터 제어 모드의 경우 SB3 버튼을 누르면 닫힌 접점이 접촉기 KM의 코일을 켜고 개방 접점이 접촉기의 자동 잠금 회로를 차단합니다. 이 회로의 단점은 KM 블록의 접점이 열리고 모터가 꺼지지 않기 전에 SB3 버튼의 열린 접점이 닫힐 수 있다는 것입니다. 그림에 표시된 회로. 2, f에는 이러한 결함이 없습니다.
연속 작동을 위해 SB2 버튼을 누르면 중간 릴레이 K가 켜집니다. 접점 K 중 하나는 접촉기 KM의 코일을 켜고 다른 하나는 동시에 SB2 버튼을 차단하여 시작 버튼으로 엔진 작동을 끕니다. 출시된. 작동을 시작하려면 SB3 버튼을 누르고 필요한 시간 동안 누르고 있습니다.
그림 2d는 중간 릴레이를 사용하여 하나의 시작 버튼에서 동시에 여러 모터를 시작하는 방식을 보여줍니다. 버튼 SB2는 릴레이 K를 켜고 닫는 접점은 접촉기 KM1, KM2 등의 코일을 동시에 켭니다. SB1 버튼으로 모든 모터를 동시에 정지합니다. 각 모터를 개별적으로 켜고 끄려면 버튼 SB3, SB4 및 SB5, SB6 등을 각각 사용하십시오.
그림 2는 2단 2권선 농형 로터 모터의 무단 시동 다이어그램입니다. 2, 예 첫 번째 속도에서 엔진을 시동하려면 SB1 버튼이 두 번째 SB2에서 사용됩니다.두 버튼 모두 기계적으로 연동되어 엔진이 동시에 두 가지 속도로 작동하는 것을 방지합니다.
스타터 회로도 전기적으로 차단됩니다. 따라서 예를 들어 코일 KM1이 작동되면 개방 접점이 포함 가능성을 제외하고 코일 KM2의 회로를 차단합니다. 두 번째 속도로 전환하려면 코일 KM1의 회로가 끊어지고 꺼지는 동안 SB2 버튼을 눌러야합니다. KM2 회로의 코일은 전원을 받아 두 번째 속도로 모터를 켭니다.
비동기 모터의 역 제어는 두 개의 접촉기를 사용하여 수행됩니다 (그림 3, a).
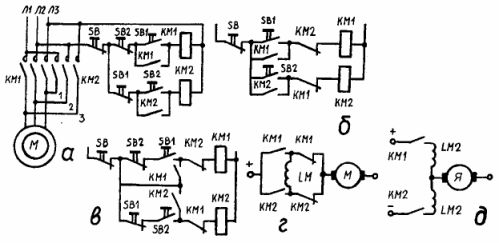
무화과. 3. 엔진 제어 방식: a — 기계적 차단 기능이 있는 가역 자기 시동 장치 b - 전기 차단과 동일; c — 옵션 a와 b의 조합; d 및 e - 저전력 DC 모터 시작 및 반전
접촉기 KM1은 모터를 정방향으로 연결하는 데 사용되고 KM2는 역방향으로 사용됩니다. 단락으로 이어지는 두 접촉기의 우발적 인 동시 전환을 방지하기 위해 회로는 버튼 SB1 및 SB2의 두 차단 접점으로 상호 기계적 차단을 사용합니다 (그림 3, a 참조) 버튼 SB1을 누르면 켜집니다. 코일 KM1의 회로를 분리하고 코일 회로 KM2를 분리합니다.
SB1 및 SB2 버튼을 동시에 누르면 코일 KM1 및 KM2의 회로가 끊어지고 접촉기가 켜지지 않습니다. 차단은 각각 코일 KM1 및 KM2의 회로에 포함된 두 개의 차단 접점 KM2 및 KM1에 의해 수행됩니다(그림 3, b). 이 방식에서 엔진을 후진시키려면 먼저 SB 버튼을 눌러야 합니다.
그림의 회로. 3, c는 이전 두 회로의 조합, 즉 이중 차단이 있습니다.SBI 버튼은 접촉기 KM1을 켜고 접촉기 KM2의 코일 회로는 버튼 SB1의 접점과 블록 KM1 접점의 동시 개방 접점에 의해 차단됩니다.
그림 3, d 및 e는 저전력 순차 여자 모터를 시작 및 역전시키는 가장 간단한 방식을 보여줍니다. 이러한 모터는 가변 저항을 시작하지 않고 네트워크에 연결됩니다. 그림의 다이어그램에 따르면. 3, d에서 직렬 여자가 있는 모터의 시동 및 역회전은 두 개의 중간 릴레이를 통해 수행됩니다. 모터는 LM 계자 코일의 전류 방향을 역전시켜 역전됩니다. 반대 방향으로 자속을 생성하는 두 개의 직렬 계자 권선이 있는 모터에서 스위칭 및 반전 회로에는 두 개의 접점만 있습니다(그림 3, e 참조).
고려된 제어 체계에서 알 수 있듯이 농형 회전자 비동기 모터의 시동 및 역전 프로세스를 자동화하는 것이 가장 쉽습니다. 이 경우 시작시 모든 제어는 모터를 전원 네트워크에 연결하고 중지시 네트워크 연결을 끊는 것으로 축소됩니다.
더 복잡한 것은 회 전자의 위상 권선이있는 유도 전동기, 증가 된 전력의 유도 농형 모터, 중간 및 고전력의 DC 모터, 단계 시작이있는 다중 속도 유도 모터의 시작, 정지 및 정지 자동화입니다. 동기 모터로. 이 엔진은 제어됩니다. 시간의 함수로, 속도 그리고 현재의.
위의 경우 외에도 엔진 제어를 수행할 수 있으며 경로 원칙에 따라, 엔진이 시동되고 작업체가 공간의 특정 위치에 도달하면 속도가 느려집니다.이러한 기능을 수행하는 시스템은 출력 값과 입력 값 사이에 피드백이 없기 때문에 개방 루프 시스템이라고 합니다.