시간의 함수로서 자동 제어 회로의 노드
 전자기, 전자, 모터 및 전기 공압은 자동화 회로에 널리 사용됩니다. 타임 릴레이... 가장 일반적인 신호 지속 시간 변환 방식이 그림에 나와 있습니다. 1. 다이어그램 그림. 1, 누르는 시간에 관계없이 일정 시간 동안 펄스를 제공합니다. 버튼 SB. 버튼 SB를 누르면 릴레이 K가 활성화되어 메커니즘을 켜려는 충동을줍니다. 펄스 지속 시간은 KT 릴레이의 시간 지연에 의해 결정됩니다. SB 버튼은 KQ 명령 릴레이로 교체할 수 있습니다.
전자기, 전자, 모터 및 전기 공압은 자동화 회로에 널리 사용됩니다. 타임 릴레이... 가장 일반적인 신호 지속 시간 변환 방식이 그림에 나와 있습니다. 1. 다이어그램 그림. 1, 누르는 시간에 관계없이 일정 시간 동안 펄스를 제공합니다. 버튼 SB. 버튼 SB를 누르면 릴레이 K가 활성화되어 메커니즘을 켜려는 충동을줍니다. 펄스 지속 시간은 KT 릴레이의 시간 지연에 의해 결정됩니다. SB 버튼은 KQ 명령 릴레이로 교체할 수 있습니다.
다이어그램 그림 8, b(전자기 시간 릴레이 포함) 및 그림. 1, c(전기 공압식 또는 전동식 시간 릴레이 포함)는 트래블 스위치 SQ의 작동이 시작된 후 단기 펄스를 공급하는 데 사용됩니다. 이들 및 후속 계획에서 연락처 대신 모션 스위치 KQ 릴레이 접점을 사용할 수 있습니다.
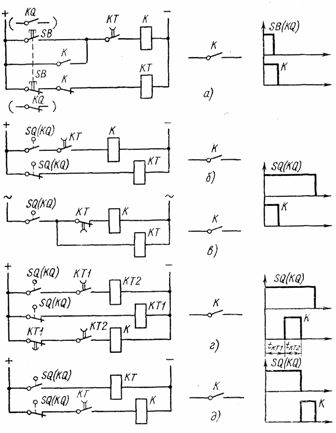
쌀. 1. 신호의 지속 시간을 변환하는 회로
계획 무화과.1d는 스위치 SQ의 동작이 시작된 후 시간 지연 tKT1과 함께 기간 tKT2의 펄스를 제공합니다.
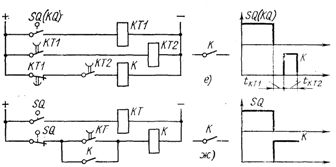
회로 노드 Fig. 1, e.이 펄스가 적용되기 전에 시간 지연 tKT1이 필요한 경우 그림의 회로. 1, e. 펄스 지속 시간은 tKT2입니다.
위치 제어 회로에서 그림 1의 회로는 트립 스위치 SQ에 대한 충격이 끝난 후 긴 명령을 내리는 기능을 수행하는 1g. SQ 스위치에서 새로운 동작이 시작되면 명령이 취소됩니다.
기존 방식으로 스위치를 켜고 끄면 짧은 시간 지연(최대 1.5초)을 얻을 수 있습니다. 중간 릴레이 커패시터 또는 다이오드로 코일을 분류하기 때문입니다.
그림의 다이어그램에서. 2, 접점 KQ가 닫히면 커패시터 C의 충전 시간에 의해 결정된 시간 지연으로 릴레이 K가 활성화됩니다. KQ가 닫히면 릴레이 K도 커패시터 방전으로 인해 지연되어 복귀합니다.

쌀. 2. 커패시터 또는 다이오드로 중간 릴레이의 코일을 분로하여 시간 지연 얻기
릴레이가 켜져 있을 때만 시간 지연을 얻으려면 그림 1의 회로를 사용하십시오. 2, 나. 커패시터가 저항 R로 빠르게 방전되기 때문에 릴레이가 꺼질 때 지연이 거의 없습니다 (저항 R의 저항은 릴레이 코일 K의 저항보다 훨씬 적습니다). 비슷한 문제가 그림의 회로에 의해 해결됩니다. KQ 계전기의 하나의 개방 접점을 사용하는 2c. 이 회로의 단점은 신호가 없을 때 저항을 통한 상당한 에너지 손실입니다.
그림의 계획. 2d, 접점 KQ가 열리면 릴레이 K는 저항 R에 의해 제어되는 시간 지연으로 꺼집니다.
그림의 다이어그램에 따르면. 2, e 명령 릴레이 KQ의 접점이 닫힌 후 K가 꺼지면 시간 지연이 발생합니다.
명령 릴레이 KQ가 활성화될 때 릴레이 K의 반환에 약간의 지연이 필요한 경우 그림의 다이어그램. 2, e, 릴레이 K의 코일이 다이오드에 의해 분류됩니다.
주어진 지속 시간과 듀티 사이클의 펄스를 생성하는 방식이 그림에 나와 있습니다. 3, 가. 펄스 지속 시간은 KT2 릴레이의 시간 지연에 의해 결정되고 일시 중지는 KT1 릴레이의 지연 시간에 의해 결정됩니다.
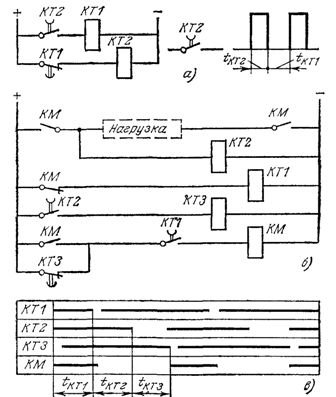
쌀. 3. 펄스 생성을 위한 릴레이 회로
무화과에서. 3, b, 연장 된 일시 중지 시간을 갖는 메커니즘의 주기적 켜기 다이어그램이 제공됩니다. 접촉기 KM의 켜기 시간은 릴레이 KT1의 시간 지연과 같고 일시 중지 기간은 합입니다. 릴레이 KT2 및 KTZ의 지연 중. 타이밍 다이어그램은 그림 1에 나와 있습니다. 3, 다.
시간 계전기의 펄스 발생기 회로도 또는 논리적 요소 (아래 참조)는 선형 메커니즘의 작동 속도를 조절하는 데에도 사용됩니다. 엔진 타이밍 릴레이와 여러 면에서 유사한 KEP-12U 명령 장치를 포함하는 온도 컨트롤러도 널리 보급되었습니다. 이 장치에는 실행 모터, 가변 기어, 캠 드럼, 스위치 및 12개의 접점이 있습니다.
속도 조절기는 일반적으로 KEP-12U 장치의 주기적 작동 방식을 사용합니다 (그림 4, a). 회로는 릴레이 K1 및 K2와 명령 장치 KT.1 및 KT.2의 접점을 사용하여 구성되며 그 회로도는 그림 1에 나와 있습니다. 4, 나.
작업을 시작하기 전에 S 스위치를 켜십시오.KQ 릴레이 접점이 잠시 닫혀 듀티 사이클을 시작하라는 명령을 내리면 K1 릴레이에 전원이 공급되고 자체 래칭됩니다. 릴레이 K2는 명령 장치 KT를 켜면 활성화됩니다. 모터 권선 LM1 및 LM2에 전원이 공급되고 캠 드럼이 회전하기 시작합니다. KT.3, KT.4 등의 장치의 출력 접점은 정해진 시간에 순차적으로 닫히며 (그림 4, b의 다이어그램 참조) 선형 메커니즘을 켜라는 명령을 내립니다. 주기 중간에 KT.1 접점이 열리고 릴레이 K1이 꺼집니다.
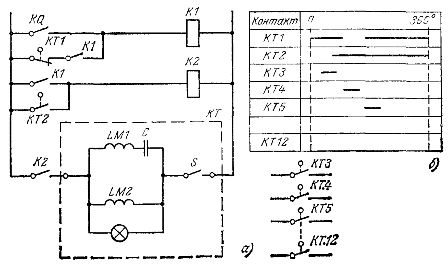
그림 4. KEP-12U 장치가 있는 회선 속도 컨트롤러
릴레이 코일 K2는 장치 KT.2의 접점을 통해 전원 공급을 지원합니다. 360 ° 각도로 드럼을 회전시킨 후 KT.2 접점이 열리고 KEP-12U 장치의 모터가 멈 춥니 다. 체인은 다음 주기를 위해 준비되었습니다.
결론적으로 전자기 시간 릴레이의 지연을 원격 제어하는 두 가지 방식을 고려할 것입니다.
제어판에서 지연을 변경하려면 트리거 코일 KT.1과 리턴 코일 KT가 있는 2코일 릴레이 회로를 사용할 수 있습니다. 2(소거), 그의 MDS는 반대 방향으로 향합니다(그림 5, a). 릴리스 코일의 MDS는 RP 전위차계를 사용하여 조정됩니다. 자화 반전이 반환되고 트립된 후 CT의 반복 작동을 방지하려면 트리핑 코일의 MDS가 전기자를 당기기에 충분한 MDS보다 작아야 합니다. 5, 가).
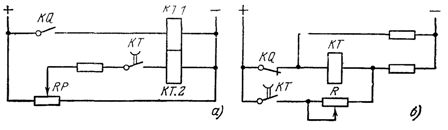
그림 5. 시간 릴레이 지연의 원격 조정을 위한 회로도
그림의 다이어그램에 따르면.5, b는 단일 코일 릴레이의 시간 지연을 원격으로 변경합니다. 접점 KQ가 열리면 릴레이 코일 KT는 저항 R에 의해 조절되는 소자 전류와 함께 흐릅니다. 소자 전류가 증가하면 릴레이 지연이 감소하고 그 반대도 마찬가지입니다. 공급 전압이 220V인 경우 공칭 전압이 110V인 코일이 있는 릴레이가 사용됩니다.