원심 및 왕복 유형의 메커니즘에 대한 전기 구동 방식의 예
 무화과에서. 도 1a는 광산 샤프트와 매설면의 뒷부분에서 지하수를 펌핑하도록 설계된 광산 배수 설비의 펌프 기술 다이어그램을 보여줍니다. 설치에는 펌프의 지속적인 충전을 보장하는 충전 탱크 1B 및 2B가 있는 2개의 펌프 1H 및 2H가 포함됩니다.
무화과에서. 도 1a는 광산 샤프트와 매설면의 뒷부분에서 지하수를 펌핑하도록 설계된 광산 배수 설비의 펌프 기술 다이어그램을 보여줍니다. 설치에는 펌프의 지속적인 충전을 보장하는 충전 탱크 1B 및 2B가 있는 2개의 펌프 1H 및 2H가 포함됩니다.
펌프는 다람쥐 1D 및 2D가있는 비동기식 모터에 의해 회전 구동되며 신뢰성을 높이기 위해 하강 변전소의 다른 버스 섹션에 연결됩니다 (그림 1, b). 구덩이의 수위가 작업 수준보다 낮으면 펌프가 물을 펌핑하지 않습니다. 물이 작업 수준을 초과하면 펌프 중 하나가 작동됩니다. 수위가 비상 수준 이상으로 상승하면 두 번째 백업 펌프가 작동하도록 연결됩니다.
계획 전기로 움직이는 운동 펌프 모터를 다양하게 제어할 수 있습니다.
• 구덩이의 수위에 따라 자동으로,
• 원격으로(통제실에서),
• 지역 마을 컨트롤 버튼펌프에 직접 위치합니다.
자동 AU 및 원격 제어 선택은 1UP 및 2UP 범용 스위치를 통해 이루어집니다. 스위치 1PP 및 2PP를 사용하면 1KU 및 2KU 버튼을 사용하여 원격 제어 및 로컬 제어와 같이 각 모터에 대한 제어 방법을 선택할 수 있습니다. 소프트웨어 스위치는 장비의 균일한 마모를 허용하여 1D 및 2D 모터를 실행 모터로 번갈아 사용합니다.
자동 엔진 시동 작동 펌프는 작동 수위를 제어하는 플로트 스위치 1PR을 사용하여 구현됩니다. 백업 펌프 모터는 비상 레벨을 제어하는 플로트 릴레이 2PR에 의해 켜집니다.
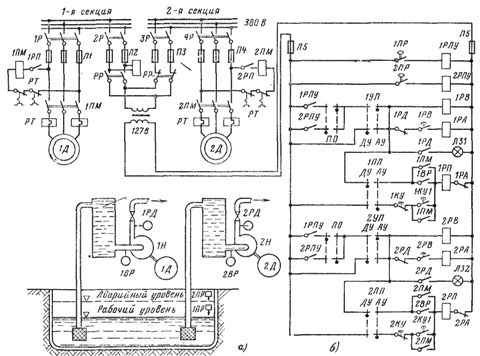
쌀. 1. 탈수 설비(a) 및 전기 회로(b).
릴레이 1PB 또는 2PB의 지연 시간 후에 펌프가 필요한 압력을 생성하지 않으면 모터가 네트워크에서 분리됩니다. 펌프에 물이 완전히 채워지지 않은 경우에도 엔진이 시동되지 않습니다(충전 탱크의 수위가 부족하고 충전 제어 릴레이 1BP 또는 2BP의 접점이 열려 있음).
무화과에서. 도 2는 왕복동 압축기의 자동화된 전기 구동의 다이어그램을 보여준다. 비동기식 압축기 모터는 2KP 버튼을 사용하여 압축기 설치 현장에서, 1KP 버튼을 사용하여 제어실에서 시작할 수 있습니다. 에어 리시버(리시버)의 압력이 정상보다 낮으면 2RP 릴레이를 통해 시작 권한이 부여됩니다. 이 경우 릴레이 2RP 회로의 압력 스위치 1RP의 닫힘 접점이 닫히고 릴레이 2RP의 코일에 전류가 흐르고 KL 라인의 접촉기 회로의 닫힘 접점 2RP가 닫힙니다.
접촉기 KL을 켠 후 전기 유압 밸브 1KEG의 코일에 전원이 공급되어 압축기에 냉각수를 공급합니다. 얼마 후 RV 릴레이는 4RP 릴레이에 전원을 공급하여 2KEG 밸브를 켭니다. 이 밸브는 압축기에서 대기로의 공기 배출구를 차단합니다. PB 릴레이의 지연은 엔진 시동 시간보다 약간 더 길기 때문에 2KEG 밸브가 열리고 엔진 시동이 용이합니다.
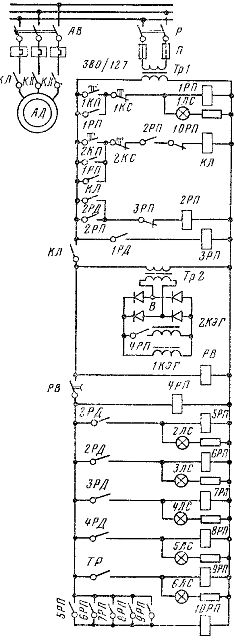
쌀. 2. 왕복 압축기의 전기 구동 다이어그램.
공기 흐름이 낮고 수신기의 압력이 표준을 초과하면 3RP 릴레이 회로의 1RD 접점이 닫힙니다. 후자는 열린 접점으로 릴레이 2RP를 끕니다.접점 회로 KL은 전원을 잃고 엔진이 네트워크에서 분리됩니다.공기 흐름이 증가하고 수신기의 압력이 표준에 비해 감소하면 압력 스위치 상단 접점 1RD를 닫고 릴레이 2RP를 켭니다. KL 접촉기 코일에 다시 전원이 공급되고 위에서 설명한 것과 동일한 방식으로 압축기가 시작됩니다.
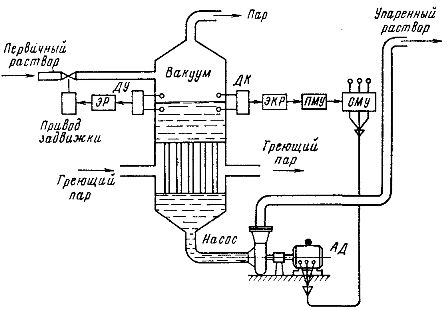
쌀. 3. 액체 증발 설비의 계획
이 회로는 냉장고 공기압, 메인 베어링에 공급되는 냉각수 및 오일의 압력, 오일 온도가 범위를 벗어나면 엔진을 자동으로 차단합니다. 지정된 매개변수는 압력 스위치 2RD, 3RD, 4RD 및 온도 릴레이 TP를 사용하여 제어됩니다. 모터 셧다운 신호는 릴레이 5RP — 9RP를 통해 릴레이 10RP로 공급되어 접촉기 KL을 비상 셧다운합니다.
무화과에서. 도 3은 자동화된 액체 증발 플랜트의 다이어그램을 보여준다.이 경우 펌프는 액체 생산을 위한 주요 기술 프로세스에 포함됩니다. 알칼리성 용액은 액체 농도가 필요한 수준으로 증가하는 열교환기에서 증발됩니다. 장치는 용액의 끓는점을 낮추기 위해 진공 상태에서 작동하므로 증기 가열에 의해 장치에 공급되는 열을 줄입니다. 장치에서 액체를 선택하고 증발의 다음 단계 또는 수집 탱크로의 공급은 펌프의 도움으로 지속적으로 수행됩니다. 필요한 수준의 액체 농도는 영구 제어 시스템에 의해 유지됩니다.
이 시스템에는 장치 내 DC 액체의 제어 수준 및 농도에 대한 센서, 전자 조절기 ER 및 EK R., 장치 입구의 구동 밸브 및 출구의 전기 펌프 드라이브가 포함됩니다. 액체 위의 포화 증기 온도는 밀도에 따라 달라지기 때문에 액체 농도는 브리지 온도 센서로 측정됩니다.
필요한 농도 수준은 EKR 전자 조절기의 전위차계로 설정됩니다. 주어진 수준에 비해 농도가 증가함에 따라 EKR의 출력 전압과 중간 자기 증폭기(PMU)의 제어 전류가 증가한다. 펌프 모터의 속도가 증가하고 펌프의 유량이 증가합니다. 이는 장치를 통과하는 액체의 증발 시간을 감소시킵니다. 따라서 농도가 감소하기 시작합니다.
펌프 흐름의 증가로 인해 장치의 액체 레벨이 감소하면 ER 조절기를 통한 리모콘의 레벨 센서가 입구 밸브를 더 열라는 신호를 보냅니다.용액의 추가 유입은 장치의 수준을 복원하고 사전 설정된 농도 수준의 가장 빠른 복원에 기여합니다.
무화과에서. 4는 최대 7 - 10 kW의 전력을 가진 펌프의 자동 전기 구동 다이어그램을 보여줍니다. 펌프는 농형 유도 전동기에 의해 구동됩니다. 모터의 속도는 고정자 회로에 포함된 3상 자기 증폭기 SMU를 사용하여 제어됩니다. 설치의 큰 정적 헤드는 모터 속도의 작은 변화로 펌프의 흐름을 조정하는 데 필요한 범위를 제공할 수 있습니다.
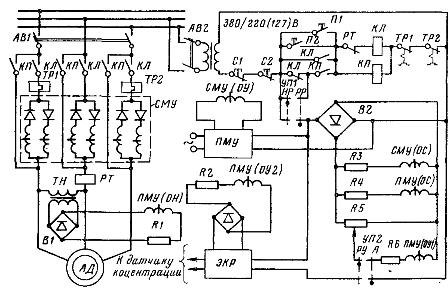
쌀. 4. 증발기 펌프의 전기 구동 다이어그램.
전기 드라이브의 충분히 견고한 기계적 특성을 얻기 위해 SMU의 작동 권선에 의해 생성된 내부 양전류 커플링 외에도 음전압 커플링이 적용됩니다. PMU를 사용하면 SMU를 제어하는 데 필요한 정도로 EKR의 출력 전력을 증가시킬 수 있을 뿐만 아니라 변압기 VT의 크기를 줄이고 기계적 특성의 강성을 높일 수 있습니다. 시동 중 엔진 토크를 높이기 위해 기어박스 접촉기에 의해 자기 전력 증폭기가 움직입니다.
엔진 제어 회로를 사용하면 주 제어 패널과 설치 장소(버튼 P1, P2, C1, C2)에서 펌프를 시작 및 중지할 수 있습니다.스위치 UP1을 사용하면 HP 펌프의 비조절 작동 모드를 설정할 수 있습니다. SMU는 접촉기 KP로 둘러싸여 있으며 시동 종료 시 KP가 전류 릴레이 RT에 의해 꺼지고 SMU의 작동 권선이 고정자 회로. UP2 스위치를 사용하여 펌프의 조정 가능한 작동 모드(자동 A 또는 RU의 수동 제어) 중 하나를 선택할 수 있습니다.