여러 위치에서 전기 구동 제어 체계
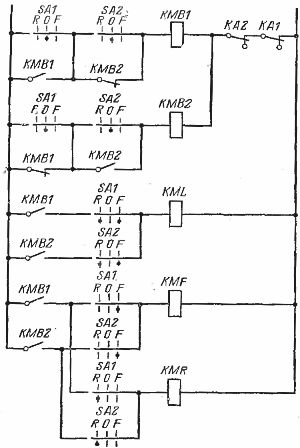
 드라이브가 주로 한 방향(정방향)으로 작동하고 반전이 드문 연속 공정 라인의 경우 차단기를 통한 "정방향" 작동을 위한 라인 접촉기가 포함된 회로(그림 1)를 사용하는 것이 좋습니다. "역방향" 작동 - KMR 접촉기의 작동 접점을 통해. 이 배열은 원하는 방향으로 드라이브를 시작하는 시간을 줄입니다.
드라이브가 주로 한 방향(정방향)으로 작동하고 반전이 드문 연속 공정 라인의 경우 차단기를 통한 "정방향" 작동을 위한 라인 접촉기가 포함된 회로(그림 1)를 사용하는 것이 좋습니다. "역방향" 작동 - KMR 접촉기의 작동 접점을 통해. 이 배열은 원하는 방향으로 드라이브를 시작하는 시간을 줄입니다.
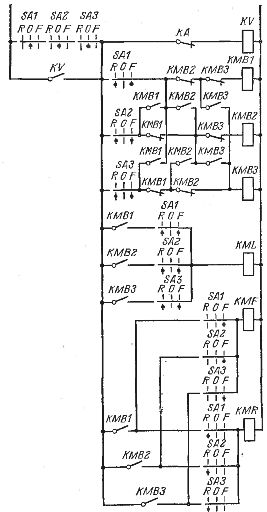
그림의 다이어그램. 2 움직이는 물체에서 전기 모터를 원격으로 가역 제어할 수 있습니다. 이 회로는 예를 들어 크레인에서 난방 덮개의 모터를 제어하는 데 사용됩니다. 신호 회로와 다양한 신호 수신은 그림 1에 나와 있습니다. 3 – 9.
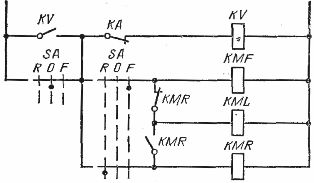
쌀. 1. 드문 후방 «후방»을 사용한 후방 엔진 제어 방식.
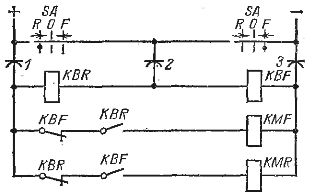
쌀. 2. 제어 트롤을 통한 모터의 가역 제어 방식.
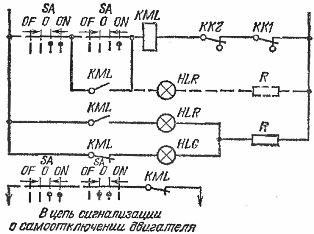
쌀. 3. 돌이킬 수 없는 전기 드라이브의 상태를 알리는 체계.
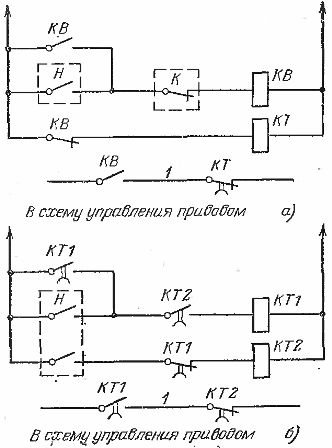
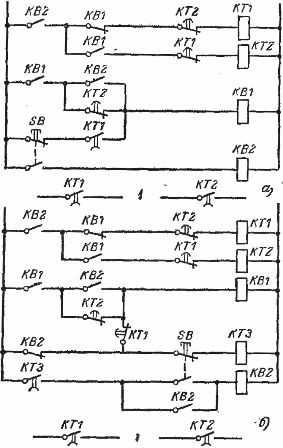
쌀. 4.긴 (a) 및 펄스 (b) 신호에 노출되기 시작한 후 시간 지연으로 신호를 수신하는 회로: K — 잠금 해제 접점, 1 — 드라이브의 제어 회로에 접촉합니다.
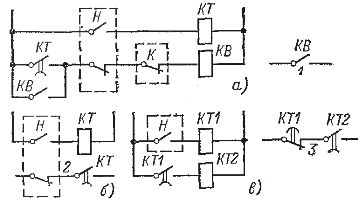
쌀. 5. 신호 H long (a), 펄스 (b), 시간 지연 펄스 (c)의 비트가 끝난 후 (꼬리에서) 신호를 수신하는 방식. K — 잠금 해제 접점, 1, 2, 3 — 구동 제어 회로에 대한 접점.
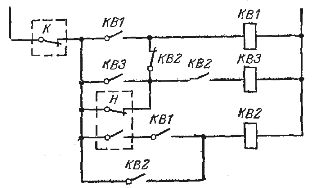
쌀. 6. 보조 H가 시작된 후 긴 신호를 수신하는 방식.
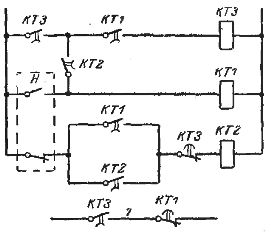
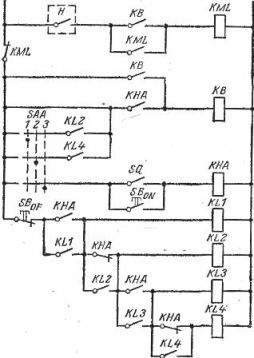
쌀. 7. 신호 H의 2차 동작 후 시간 지연으로 펄스 신호를 수신하는 방식(KT1은 0.2-0.8초, KT2는 0.3초, KTZ는 0.5초). 1 — 드라이브 제어 회로에 대한 접점.
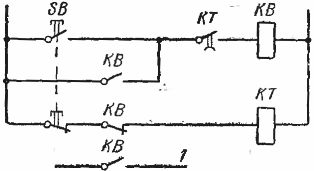
쌀. 8. 버튼을 누르는 시간에 관계없이 일정 시간 동안 신호를 수신하는 방식: 1 — 구동 제어 회로에 접촉.
카운팅 체계는 특정 수의 작업 또는 사이클을 카운트한 후 드라이브에 자동으로 영향을 주는 데 사용됩니다. 닫힘과 열림(그림 10), 닫힘만(그림 11) 또는 열림만(그림 12) 셀 수 있습니다.
표시된 방식에 따른 카운팅 펄스는 포토 릴레이 접점, 모션 스위치 또는 기타 장치에서 제공됩니다.
그림에 표시된 계산 방식에서. 10에서 REV850 계전기는 전기자의 자기 "고정"과 함께 사용되므로 이 회로에 대한 전압 공급 중단이 카운팅을 방해하지 않습니다. 다른 카운팅 회로에서는 전압 공급이 중단되면 펄스 카운트가 손실됩니다.
계정 체계의 유효성을 확인하려면(그림 11), 컨트롤 버튼… SB0N 버튼을 누를 때마다 회로가 하나의 카운트를 수행합니다. SB0F 버튼은 카운터를 재설정하는 데 사용됩니다.이러한 버튼은 다른 방식으로도 제공될 수 있습니다.
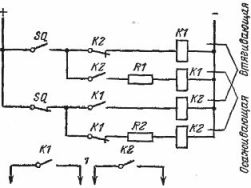
쌀. 9. 하나의 버튼을 연속적으로 눌러 두 개의 서로 다른 회로에서 신호를 수신하는 회로: a — 신호 지속 시간은 버튼을 누르는 시간과 같습니다. b — 신호 지속 시간은 버튼을 누르는 시간에 의존하지 않습니다. , 1 — 구동 제어 회로에 대한 접점.
쌀. 10. 최대 2개의 계정 구성표.
각 숫자에 대한 펄스는 리미트 스위치 SQ의 접점을 한 번 닫고 한 번 여는 것입니다. 1 — 드라이브 제어 회로에 대한 접점.
그림의 회로에서 펄스를 계산합니다. 11, 12는 SQ 접점의 단기 폐쇄(열림)이며, 이 접점의 폐쇄 상태는 임펄스 접촉기 KNA와 하나의 릴레이 KB(KL)를 켜기에 충분해야 합니다.
쌀. 11. 접점 SQ가 닫힐 때 3까지 세는 방식.
쌀. 12. SQ 접점을 열 때 3까지 세는 방식
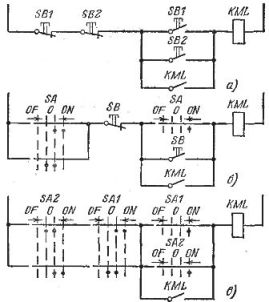
쌀 13. 두 곳에서 엔진을 비가역적으로 제어하는 방식: a — 두 개의 버튼, b — 버튼과 키, c — 두 개의 키.
쌀. 14. 두 곳에서 전기 드라이브의 일방적 종속 가역 제어 방식.
카운트는 KML 라인 컨택터에 의해 재설정됩니다. SQ 접촉기의 닫힌 시간은 KML 접촉기의 켜짐 시간보다 짧아야 합니다.
약간 큰 수에 대한 계수 방식은 위의 방식과 유사하게 작성할 수 있지만 계수가 5 또는 8을 초과하거나 전압이 사라질 때 계수 손실이 허용되지 않는 경우에는 계수를 사용하는 것이 좋습니다. 릴레이.
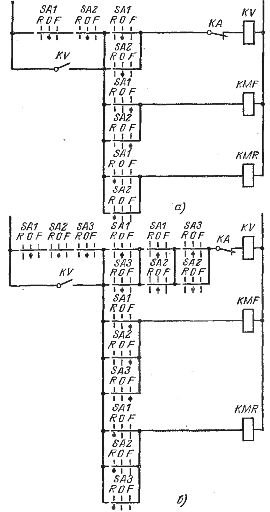
쌀. 15. 종속 가역 엔진 제어 방식: a - 두 곳에서, b - 세 곳에서
최대 30 카운트에 대한 유형 E-526 모터 스텝 카운트 릴레이 또는 최대 75 펄스 카운트가 있는 유형 E 531 펄스 카운트 릴레이를 사용할 수 있습니다. 릴레이는 교류에서 작동하며 해당 접점은 각각 220 V AC에서 전원 차단을 가능하게 합니다. 및 DC 50 및 30와트.
여러 위치의 전기 모터 제어 회로는 종속적, 단방향 종속적 및 독립적일 수 있습니다(그림 13). 가장 자주 종속 제어 체계가 가장 단순하게 사용됩니다(그림 15). 이러한 방식에 따르면 어떤 제어 장치를 작동할 때 다른 장치의 핸들을 0에서 작동 위치로 이동하면 모터가 정지합니다.
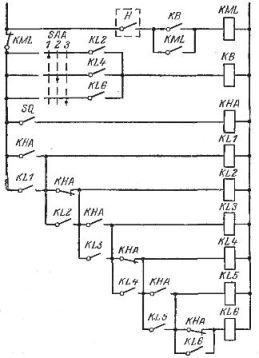
2곳(그림 14)과 3곳(그림 16)의 단방향 종속 제어 방식에 따라 스위치 SA1은 스위치 SA2(SA2 및 SA3)의 위치와 독립적으로 제어할 수 있습니다. SA2 스위치의 제어는 SA1 스위치가 0 위치에 있고 SA3 스위치의 위치에 의존하지 않을 때 가능합니다. SA1 및 SA2 스위치가 0 위치에 있을 때 SA3 스위치의 제어가 가능합니다.
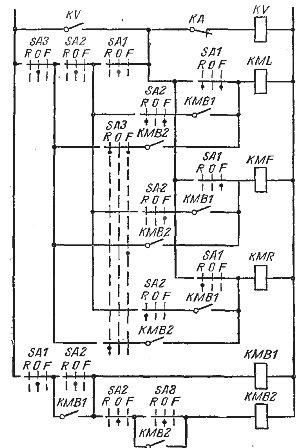
그림 16. 3곳 왕복 모터의 단방향 종속 제어의 개략도
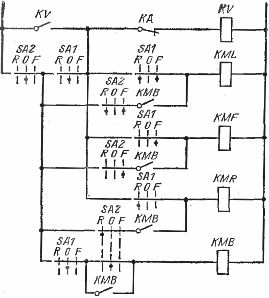
쌀. 17. 두 곳에서 엔진을 독립적으로 가역적으로 제어하는 방식.
쌀. 18. 세 곳에서 엔진을 독립적으로 가역적으로 제어하는 방식.
독립 제어 방식(그림 17 및 18)에서 드라이브가 첫 번째 스위치(SA1, SA2 또는 SA3)에 의해 제어되는 경우 다른 스위치의 핸들을 움직여도 드라이브 작동에 영향을 미치지 않습니다. 첫 번째 키 핸들의 제로 위치로 돌아간 후 액추에이터는 두 번째 키(또는 다른 두 개)의 핸들 위치에 관계없이 중지합니다. 새로운 시작은 두 번째 키(또는 다른 두 개)를 0 위치로 되돌린 후에만 가능합니다.
매우 자주 그들은 단순화된 계획에 따라 2곳과 3곳에서 드라이브 제어를 사용합니다(그림 19). 이는 첫 번째 위치(키 SA1)에서만 우선적으로 제어할 수 있음을 의미합니다. 드라이브가 다른 스위치(SA2 또는 SA3)에 의해 제어되는 경우 첫 번째 스위치의 핸들을 0 위치에서 이동하면 제어가 해당 스위치로 전송됩니다.
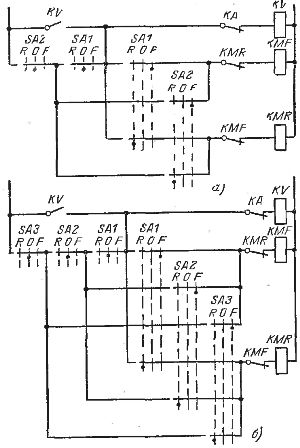
쌀. 19. 가역 전기 드라이브를 제어하기 위한 단순화된 방식: a — 두 곳에서, b – 세 곳에서.