메커니즘의 움직임에 대한 피스톤 제어
릴레이 회로
 무화과에서. 도 1은 SQ 컨트롤러에 의해 고정된 일정 행정 피스톤 모션 제어 체계의 다양한 변형을 보여준다.
무화과에서. 도 1은 SQ 컨트롤러에 의해 고정된 일정 행정 피스톤 모션 제어 체계의 다양한 변형을 보여준다.
그림의 다이어그램. 1에서 a-c는 주기가 시작 위치로의 하나의 "앞으로" 이동 B와 하나의 "뒤로" 이동 H로 구성될 때 사용됩니다. 계획 1, a 및 b는 KQ 계전기가 제공하는 자동 명령과 함께 사용됩니다. KT 릴레이는 후진을 시작하기 전에 일시 중지를 제공합니다. 그림의 다이어그램에서. 1, 사이클 시작 명령은 컨트롤러 또는 범용 스위치 SM에 의해 제공됩니다.
무한 왕복운동을 구현하기 위해서는 Fig. 1, d. 스트로크 수가 주어진 값 n에 의해 제한되어야 하는 경우 "후면" 접촉기 KM2의 폐쇄 접점에 의해 공급되는 펄스를 계산하는 카운팅 릴레이 또는 여러 릴레이 단위의 개방 접점은 다음과 같습니다. 접촉기 회로 « 앞으로» KM1에 포함됩니다.
4개의 위치에서 가변 행정 길이로 왕복 운동을 구현하는 예가 그림에 나와 있습니다. 2.접점 SQ.1- 명령 장치 SQ의 SQ.4-는 "정방향" 스트로크의 위치 1-4에서 메커니즘을 교대로 끄는 데 사용되며 초기 위치에서 접점 SQ.5-에 사용됩니다. 이 회로는 예를 들어 공작물을 공급할 때 닫히는 자동화 릴레이 KQ1과 각 스트로크의 끝에서 중간 작업의 끝을 고정하는 KQ2에서 제공하는 펄스 명령을 사용합니다.
순차적 기동 SQ.1 - SQ 컨트롤러의 SQ.3은 "뒤로" 메커니즘 KS1, KSZ 및 KS5의 이동 횟수를 계산하기 위한 릴레이 접점에 의해 수행됩니다. 네 번째 이동 "뒤로"를 고정하는 릴레이 KS7은 릴레이 KS1-KC6을 끄고 이 블랭크 그룹(릴레이 KR)을 사용하여 기술 작업이 끝날 때까지 파란색이 "앞으로" 전환되는 것을 금지합니다. KC7 코일 회로에서 KR 릴레이의 개방 접점은 회로를 원래 상태로 되돌립니다.
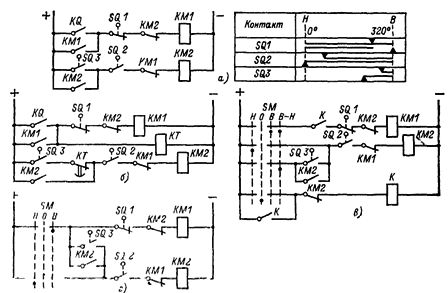
쌀. 1. 왕복 운동을 위한 릴레이 제어 회로
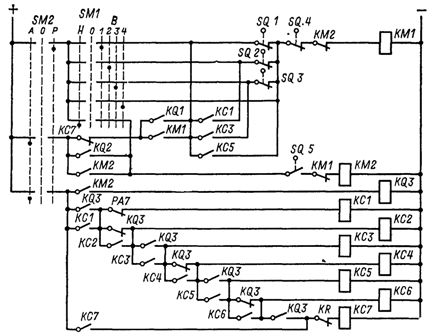
그림 2. 가변 행정 길이를 가진 왕복 릴레이의 제어 방식
논리 회로
«Logic T» 시리즈의 요소로 만들어진 피스톤 이동 제어 회로가 그림에 나와 있습니다. 3. T-201 유형의 요소 D1-D3은 입력 릴레이 신호를 논리 요소와 조정하는 데 사용됩니다.
요소 D4.1, D4.2의 메모리는 릴레이 KQ가 펄스로 켜질 때 "앞으로"이동하라는 명령의 존재를 고정합니다. 증폭기 D5를 통해 전면 접촉기 KM1이 켜집니다. "정방향"메커니즘의 이동이 끝나면 컨트롤러 SQ 1의 접점이 닫히면 해당 요소 D2의 출력에 신호 1이 나타나 메모리 D4와 접촉기 KM1을 끄고 켭니다. 요소 D6의 메모리. 이 경우 "뒤로"이동하라는 명령이 주어지고 기억됩니다.이 명령은 제거되고 컨트롤러 SQ 2의 접점이 초기 위치에서 닫히면 해당 요소 D3의 출력에 신호 1이 나타나 메모리 D6을 비활성화하면 역방향 이동이 중지됩니다.
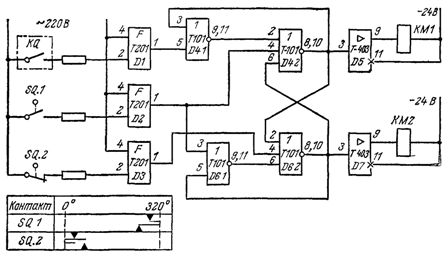
쌀. 3. «Logic T» 시리즈 요소의 왕복 운동 제어 방식
메모리 D4와 D6은 차단되어 있어 하나만 켤 수 있습니다. 메모리 D4가 켜지면 요소 D4.2의 출력 신호 1이 요소 D6.2의 입력 2로 공급되어 메모리 D6이 비활성화되고 그 반대의 경우도 마찬가지입니다. 메모리 D6이 켜지면 요소 D6 2의 출력에서 신호 1이 요소 D4.2의 입력 6으로 공급되어 메모리 D4가 비활성화됩니다.