컨베이어 드라이브 체인
 이 기사에서는 일부 컨베이어의 전기 구동 방식을 살펴봅니다. 무화과에서. 1은 속도가 엄격히 동일해야 하는 개별 컨베이어 라인의 전기 구동에 대한 개략도를 보여줍니다. 이러한 필요성은 별도의 라인에서 필요한 기술 작업 후 서로 다른 제품이 서로 엄격하게 일치하는 조립 현장에서 만나야 하는 연속 생산에서 발생합니다.
이 기사에서는 일부 컨베이어의 전기 구동 방식을 살펴봅니다. 무화과에서. 1은 속도가 엄격히 동일해야 하는 개별 컨베이어 라인의 전기 구동에 대한 개략도를 보여줍니다. 이러한 필요성은 별도의 라인에서 필요한 기술 작업 후 서로 다른 제품이 서로 엄격하게 일치하는 조립 현장에서 만나야 하는 연속 생산에서 발생합니다.
이 구성표를 사용하면 여러 컨베이어 라인을 동시에 시작 및 중지하고 속도를 조정할 수 있습니다. 공통 인버터 주파수 변환기를 사용하여 동기식 샤프트 방식에 따라 모터를 전환하여 조정된 동작이 이루어집니다. 모터 D1 및 D2의 속도 제어는 가변 비율 기어박스 P를 사용하여 인버터의 속도를 변경하여 수행됩니다.
컨베이어 시작 권한은 가장 중요한 영역에서 컨베이어 작동을 모니터링하는 작업자가 부여합니다. 준비 버튼 G1 및 G2를 누르면 신호 램프 LS1 및 LS2가 켜지고 릴레이 RG1 및 RG2가 활성화됩니다. 후자는 RP를 시작하기 위해 릴레이를 준비합니다.
시작 버튼을 누르면 RP가 트리거되어 접촉기 L1을 켭니다. 인버터 위치 D1 및 D2의 단상 동기화가 있습니다. 시간 지연 후 접촉기 L1과 L2에 내장된 진자 릴레이는 L2를 켜고, L1을 끄고, LZ를 번갈아 가며 켭니다. 주파수 변환기 모터의 가변 저항기 시작은 시간 원칙(시간 릴레이 RU1, RU2, RUZ)에 따라 수행됩니다.
무화과에서. 2는 지하철 에스컬레이터의 전기 구동 다이어그램을 보여 주며 승객의 상승 및 하강 작업을 할 수 있습니다. 최대 200kW의 출력을 가진 위상 회전자가 있는 비동기 모터가 구동 모터로 사용됩니다. 승객의 흐름이 미미한 하루 중 특정 시간에 에스컬레이터는 거의 유휴 상태로 오랫동안 작동할 수 있습니다.
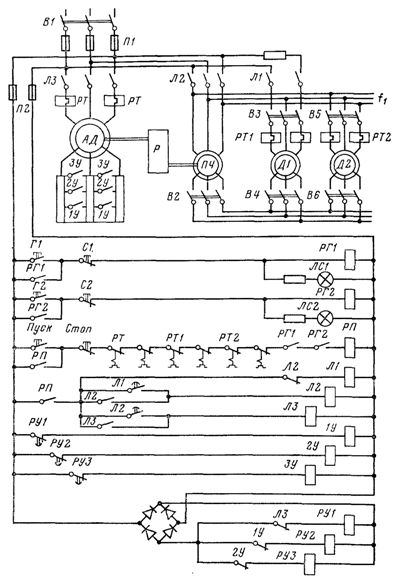
쌀. 1. 조정된 움직임으로 컨베이어 라인의 전기 구동 방식.
모터의 역률과 효율을 높이기 위해 샤프트 부하가 공칭의 약 40%로 감소하면 고정자 권선이 델타에서 스타로 전환됩니다. 하중이 증가하면 다시 삼각형으로 바뀝니다.
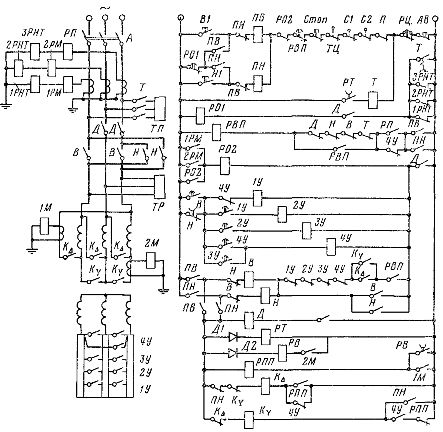
쌀. 2. 지하철 에스컬레이터의 전기 구동 방식.
상기 전환은 RPP 및 РВ 계전기를 통해 kΔ 및 kY 접촉기를 제어하는 과전류 계전기 1M 및 2M에 의해 자동으로 수행됩니다. 개방 지연 RV 접점은 2M 꺼짐과 1M 켜짐 사이의 기간에 RPP 코일 회로의 존재를 보장합니다.
최대 부하가 있는 발전기 하강 모드에서 엔진은 상승 모드에서 유사한 부하보다 훨씬 적은 부하를 받습니다(설치의 기계적 손실로 인해).따라서 드룹 모드에서 모터의 고정자 권선은 항상 스타 연결됩니다. 모터는 가속기 접촉기 1U-4U에서 진자 릴레이를 사용하여 시간 함수로 시작됩니다. 정지는 기계식입니다. 이 경우 서비스 브레이크 TP는 모터 샤프트에 설치되고 안전 TP는 구동 기어 샤프트에 설치되어 기어와 모터 샤프트 사이의 기계적 연결이 끊어지면 사다리가 정지하도록 합니다.
이 회로는 이전 섹션에서 설명한 일반적인 안전 인터록을 구현합니다. 장비의 기계 부품 오작동 - 체인 및 난간 제거(리미트 스위치 TC, P), 단계 구조 위반(리미트 스위치 C1 및 C2) ), 베어링의 과도한 온도( 써멀 릴레이 7), 과속(원심 속도 릴레이 RC).
또한 모터 보호 기능이 제공됩니다. 최대(릴레이 1RM, 2RM), 과부하(릴레이 RP), 모터의 전력 손실(제로 전류 릴레이 1RNT, 2RNT, 3RNT), 전원 접촉기의 폐쇄 접점 용접 (개방 접점 D, Y, B, 코일 회로 RVP의 T 및 코일 회로 B의 1U-4U).
전력 손실, 베어링 과열 및 모터 과부하에 대한 보호 기능은 시간 릴레이 PO1 및 RVP에 의해 결정되는 시간 지연으로 작동합니다. 원격 제어 속도 릴레이를 제외한 모든 보호 장치는 주전원에서 모터를 분리하고 TP 서비스 브레이크를 적용하여 모터를 정지시킵니다. 제동 과정이 끝날 때만 PT 릴레이의 지연 시간이 만료된 후 안전 브레이크 TP가 추가로 작동됩니다.RC 속도 릴레이가 작동하거나 비상 정지 버튼을 누르면 양쪽 브레이크가 동시에 적용됩니다.