로봇 및 로봇 장치 - 용어 및 정의
로봇: 두 개 이상의 프로그래밍 가능한 이동성 수준을 가진 실행 장치로 일정 수준의 자율성을 가지며 할당된 작업을 수행하기 위해 외부 환경에서 이동할 수 있습니다.
로봇 장치: 산업용 또는 서비스 로봇의 속성을 가지고 있지만 프로그래밍 가능한 모션 각도 또는 특정 수준의 자율성이 필요한 수의 실행 장치입니다.
GOST R 60.0.3.1-2016 로봇 및 로봇 장치. 테스트 유형
로봇: 작업 환경에서 이동하고 의도한 대로 작업을 수행하는 어느 정도의 자율성을 가지고 2개 이상의 축으로 프로그래밍할 수 있는 드라이브 메커니즘입니다.
참고 1 로봇은 제어 시스템과 제어 시스템 인터페이스를 포함합니다.
비고 2 로봇은 용도에 따라 산업용 로봇과 서비스 로봇으로 구분한다.
로봇 장치: 산업용 로봇 또는 서비스 로봇의 특성을 가진 액추에이터. 프로그래밍할 수 없는 축이 있거나 자율성이 부족할 수 있습니다.
예제 증폭기; 원격 제어 장치; 2축 산업용 매니퓰레이터.
산업용 로봇: 3개 이상의 축에서 프로그래밍 가능한 자동 제어, 재프로그래밍, 다기능 매니퓰레이터. 미리 정해진 위치에 고정하거나 산업 자동화 작업을 수행하기 위해 이동할 수 있습니다.
주 1 - 산업용 로봇에는 다음이 포함됩니다. - 액추에이터를 포함한 조작기; - 펜던트 및 통신 인터페이스(전자 장치 및 소프트웨어)용 펜던트를 포함하는 컨트롤러.
참고 2: 이 개체에는 추가 통합 축이 있을 수 있습니다.
로봇 시스템: 로봇, 로봇의 작동 부품, 작동 중 로봇을 지원하는 기계, 장비, 장치 및 센서를 포함하는 시스템입니다.
산업용 로봇 시스템: 산업용 로봇, 작업체, 기계, 장비, 장치, 외부 보조 축 및 작동 중 로봇을 지원하는 센서를 포함하는 시스템입니다.
GOST R ISO 8373-2014 로봇 및 로봇 장치. 용어 및 정의
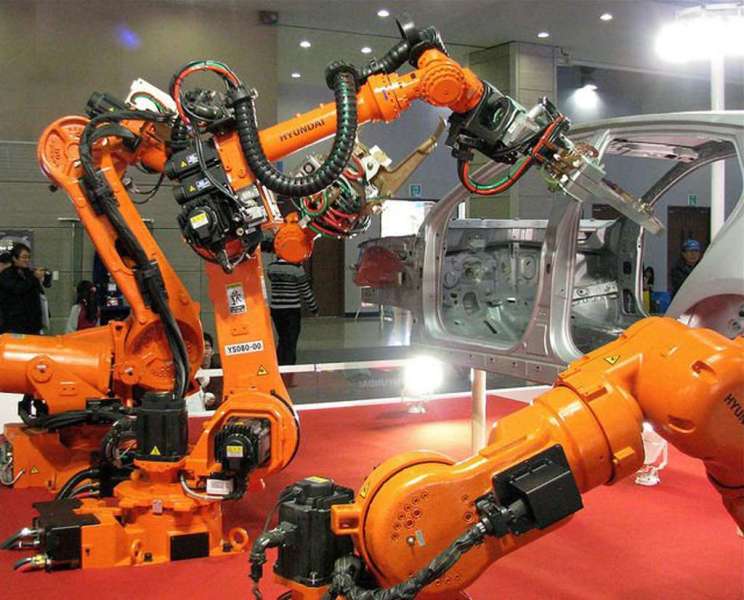
산업용 로봇
여러 수준의 이동성을 가진 조작기 형태의 실행 장치와 생산 공정에서 모터 및 제어 기능을 수행하기 위한 재프로그래밍 가능한 프로그램 제어 장치로 구성된 자동 기계, 고정식 또는 이동식.
참고: 재프로그래밍은 자동으로 또는 작업자의 도움을 받아 제어 프로그램을 대체하는 산업용 로봇의 속성입니다.재 프로그래밍에는 제어 장치의 원격 제어 장치를 사용하여 이동성 및 제어 기능의 정도에 따라 변위의 순서 및 (또는) 값을 변경하는 것이 포함됩니다.
GOST 25686-85. 매니퓰레이터, 자동차 운전자 및 산업용 로봇. 용어 및 정의(개정 1호)
로보틱스는 자동 및 자동 기술 시스템인 로봇의 설계, 생산 및 적용을 다루는 기초 및 응용 과학의 한 분야입니다.로봇은 인간의 도움 없이 작동할 수 있도록 특별히 설계되고 재프로그래밍 가능한 기계 장치입니다.
저스틴 J. Beyond BASIC Face-off // PC 기술 저널. — 1987년 9월. — P. 136. — (B.H. Lopukhov 번역).
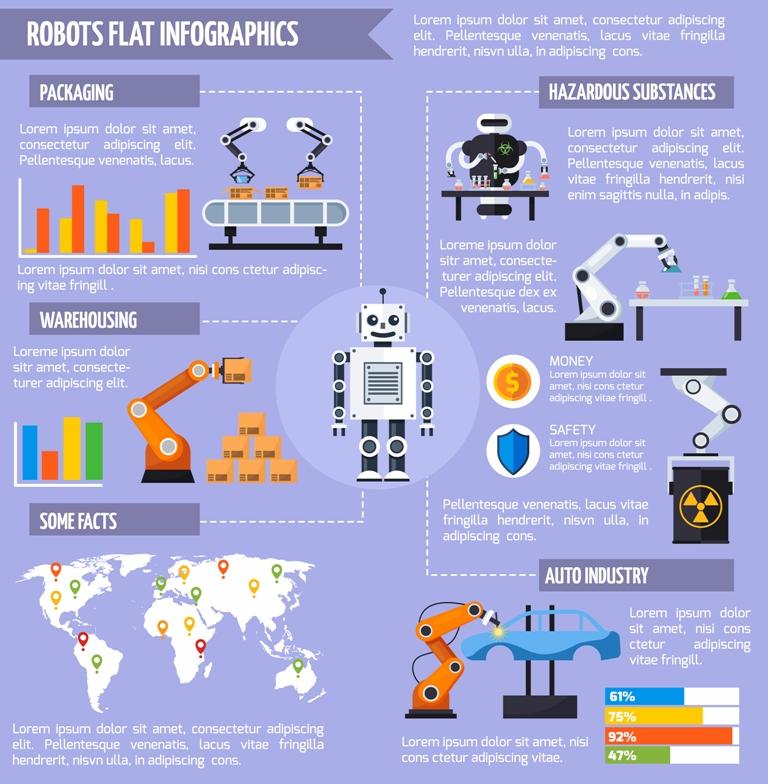
인포그래픽 로봇:
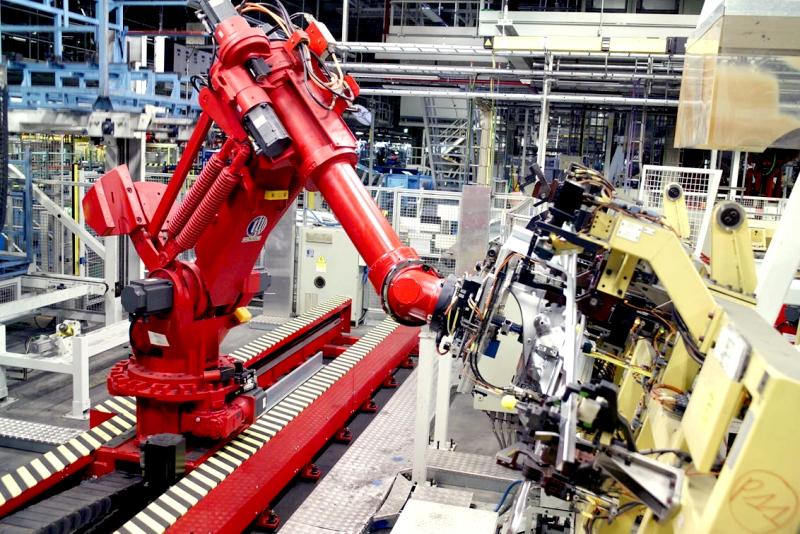
현대 로봇 공학에 등장했을 때 로봇은 육체 노동을 하는 인간이 수행하는 것과 유사한 기계적 동작을 수행하는 자동 기계로 정의되었습니다. 무엇보다 어렵고 위험한 일에서 사람을 대신하고 싶은 욕구가 로봇의 발상을 낳았다. 그러나 현대 로봇공학에서는 로봇이 인간의 일반적인 차원을 넘어섰기 때문에 로봇의 정의를 크게 확장해야 한다. 현대 로봇 공학의 주제는 물론 사람을 포함하여 살아있는 전 세계의 물체에 대한 기술적 유사체입니다.
Yurevich E. I. 로봇 공학의 기초 : 설문 조사. 용돈. — 4판, 개정. 추가 — SPb.: BHV-Petersburg, 2018.
«로봇»이라는 용어는 슬라브어에서 유래되었습니다. 유명작가 카렐 차펙의 연극 <R.U.R.>에서 소개되었다. (로섬 유니버설 로봇). 이 단어는 힘든 육체 노동에서 인간을 대체하도록 설계된 기계 로봇의 이름을 따서 명명되었습니다.기술 용어 «산업용 로봇»은 XX세기 70년대에 등장했습니다. 그러나 로봇 공학의 뿌리는 인간형 장치, 움직일 수 있는 컬트 인물, 기계 하인을 만들기 위한 첫 번째 시도가 있었던 고대로 거슬러 올라간다고 가정할 수 있습니다.
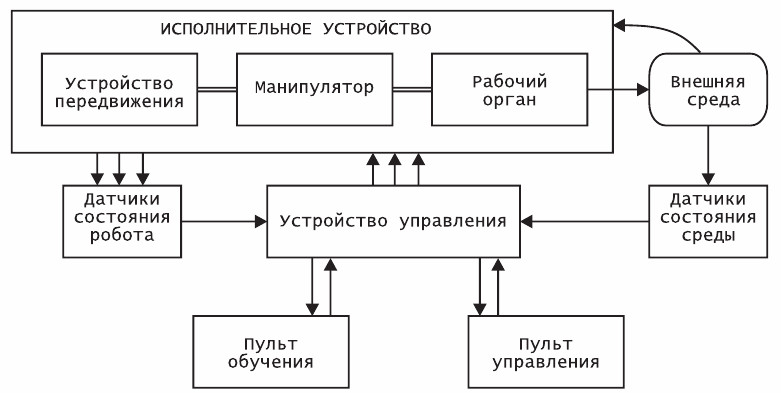
로봇은 다양한 움직임과 인간 고유의 일부 지적 기능을 수행하도록 설계된 기술 복합체입니다. 로봇에는 필요한 실행 장치, 제어 및 정보 시스템은 물론 계산 및 논리적 작업을 해결하는 도구가 장착되어 있습니다. 로봇의 주요 구성 요소는 마이크로 컴퓨터 또는 일련의 마이크로 프로세서를 포함하는 조작 메커니즘 및 자동 제어 시스템이며 경우에 따라 센서 장치도 포함합니다.
산업용 로봇의 구조도:
Bulgakov A. G., Vorobiev V. A. 산업용 로봇. 운동학, 역학, 제어 및 관리. 공학 도서관 시리즈. — M.: SOLON-PRESS, 2008.
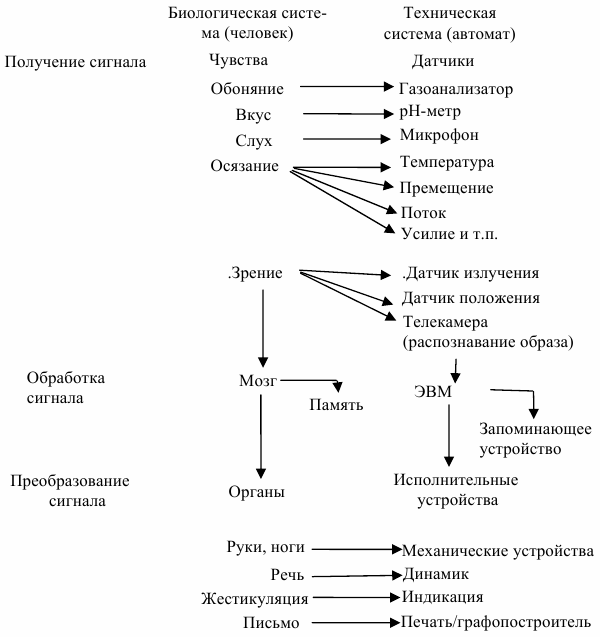 생물학적 및 기술 시스템(인간 및 로봇)에서 신호의 수신, 처리 및 변환 프로세스 간의 유추
생물학적 및 기술 시스템(인간 및 로봇)에서 신호의 수신, 처리 및 변환 프로세스 간의 유추
로봇 공학의 법칙
1. 로봇은 사람에게 해를 끼치거나 행동하지 않음으로써 사람이 해를 입도록 허용해서는 안 됩니다.
2. 로봇은 제1원칙에 위배되는 경우를 제외하고 사람의 모든 명령에 복종해야 합니다.
3. 로봇은 제1원칙과 제2원칙에 위배되지 않는 범위 내에서 안전에 유의하여야 한다.
아이작 아시모프, 1965
이 주제에 대한 기사: