전위차 센서
전위차계 센서는 공급 전압이 인가되는 가변 저항기이며 입력 값은 집전 접점의 선형 또는 각도 변위이고 출력 값은 이 접점에 걸리는 전압이며 위치에 따라 크기가 변경됩니다. 변화.
전위차 센서는 선형 또는 각도 변위를 전기 신호로 변환하고 연속 유형의 자동 및 자동 장치에서 가장 단순한 기능 종속성을 재현하도록 설계되었습니다.
 전위차 센서 연결 다이어그램
전위차 센서 연결 다이어그램
저항에 따라 전위차 센서는 다음과 같이 나뉩니다.
-
일정한 저항을 가진 라멜라;
-
연속 권선이 있는 와이어 코일;
-
저항성 층으로.

라멜라 전위차 센서는 특정 설계 결함으로 인해 상대적으로 거친 측정을 수행하는 데 사용되었습니다.
이러한 센서에서는 명목상 특별한 방식으로 선택된 일정한 저항이 라멜라에 납땜됩니다.
라멜라는 컬렉터 접점이 미끄러지는 교대 전도성 및 비전도성 요소가 있는 구조입니다.전류 수집기가 한 전도 요소에서 다른 전도 요소로 이동하면 연결된 저항의 총 저항이 한 저항의 공칭 값에 해당하는 양만큼 변경됩니다. 저항의 변화는 넓은 범위에서 발생할 수 있습니다. 측정 오류는 접촉 패드의 크기에 따라 결정됩니다.
라멜라 전위차계 센서
와이어 전위차계 센서는 보다 정확한 측정을 위해 설계되었습니다. 일반적으로 디자인은 getinax, textolite 또는 세라믹으로 만든 프레임으로, 얇은 와이어가 한 층으로 감겨 있고 집 전체가 미끄러지는 깨끗한 표면에서 차례로 회전합니다.
철사의 직경은 결정합니다 정확도 등급 전위차계 센서(높음은 0.03-0.1mm, 낮음은 0.1-0.4mm). 와이어 재료: 망가닌, fechral, 귀금속 기반 합금. 슬립 링은 와이어 마찰을 방지하기 위해 더 부드러운 재질로 만들어졌습니다.
전위차계 센서의 장점:
-
디자인의 단순성;
-
작은 크기와 무게;
-
정적 특성의 높은 선형성;
-
특성의 안정성;
-
교류 및 직류 작동 가능성.
전위차계 센서의 단점:
-
접촉 흔적의 산화, 회전의 마찰 또는 슬라이더의 굽힘으로 인해 손상을 일으킬 수 있는 슬라이딩 접촉의 존재;
-
부하로 인한 작동 오류;
-
상대적으로 작은 변환 계수;
-
고감도 역치;
-
소음의 존재;
-
임펄스 방전의 영향으로 전기 침식에 대한 민감성.

전위차 센서의 정적 특성
비가역 전위차 센서의 정적 특성
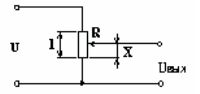
연속 코일이 있는 전위차계 센서를 예로 들어 보겠습니다. 전위차계 단자에 AC 또는 DC 전압 U가 인가되고 입력 값은 변위 X이고 출력 값은 전압 Uout입니다. 유휴 모드의 경우 관계가 참이기 때문에 센서의 정적 특성은 선형입니다. Uout = (U / R) r,
여기서 R은 코일 저항입니다. r은 코일 부분의 저항입니다.
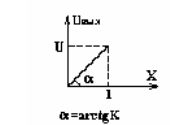
r/R = x/l(여기서 l은 코일의 총 길이임)을 가정하면, Uout = (U/l) x = Kx[V/m]를 얻습니다.
여기서 K는 센서의 변환(전송) 계수입니다.
분명히 이러한 센서는 입력 신호의 부호 변경에 응답하지 않습니다(센서는 되돌릴 수 없음). 서명 변경에 민감한 체계가 있습니다. 이러한 센서의 정적 특성은 그림에 표시된 형태를 갖습니다.
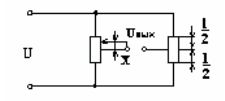
전위차계 센서의 가역 회로
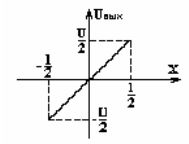
가역 전위차 센서의 정적 특성
그 결과 이상적인 특성은 다양한 유형의 오류로 인해 실제 특성과 크게 다를 수 있습니다.
1. 데드존.
출력 전압은 턴마다 이산적으로 변합니다. 이 영역은 입력 값이 작은 경우 Uout이 변경되지 않을 때 발생합니다.
전압 점프의 크기는 다음 공식에 의해 결정됩니다. DU = U / W, 여기서 W는 회전 수입니다.
감도 임계값은 코일 와이어의 직경에 의해 결정됩니다: Dx = l / W.
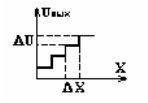
불감대용 전위차 센서
2. 와이어 직경, 저항 및 권선 피치의 가변성으로 인한 정적 특성의 불규칙성.
3. 모터 회전축과 가이드 슬리브 사이에 발생한 백래시 오차(압축스프링을 이용하여 감소).
4.마찰로 인한 오차.
전위차계 센서의 브러시를 구동하는 요소의 저전력에서 마찰로 인해 정체 영역이 발생할 수 있습니다.
브러시 압력은 신중하게 조정해야 합니다.
5. 부하 영향으로 인한 오차.
로드의 특성에 따라 정적 및 동적 모드 모두에서 오류가 발생합니다. 활성 부하를 사용하면 정적 특성이 변경됩니다. 출력 전압 값은 다음 식에 따라 결정됩니다. Uout = (UrRn) / (RRn + Rr-r2)
이것들. Uout = f(r)은 Rn에 따라 다릅니다. Rn >> R을 사용하면 Uout = (U / R) r임을 알 수 있습니다.
Rn이 대략 R과 같을 때 종속성은 비선형이고 센서의 최대 오차는 슬라이더가 (2/3)l에서 벗어날 때입니다. 일반적으로 Rн / R = 10 … 100을 선택합니다. x = (2/3) l에서 오류의 크기는 다음 식으로 결정할 수 있습니다. E = 4/27η, 여기서 η= Rн / R — 부하 계수.
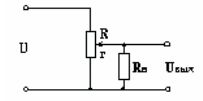
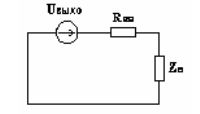
부하가 걸리는 전위차 센서
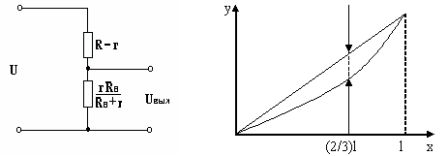 a — 부하가 있는 전위차 센서의 등가 회로 b — 전위차 센서의 정적 특성에 대한 부하의 영향.
a — 부하가 있는 전위차 센서의 등가 회로 b — 전위차 센서의 정적 특성에 대한 부하의 영향.
전위차 센서의 동적 특성
전송 기능
전달 함수를 유도하려면 부하 전류를 출력 값으로 취하는 것이 더 편리합니다. 이는 등가 생성기 정리를 사용하여 결정할 수 있습니다. B = Uout0 / (Rvn + Zn)
두 가지 경우를 고려하십시오.
1. Uout0 = K1x In = K1x / (Rin + Rn)이기 때문에 부하는 순전히 활성 Zn = Rn입니다.
여기서 K1은 센서의 유휴 속도입니다.
라플라스 변환을 적용하면 전달 함수 W(p) = In(p) / X(p) = K1 / (Rin + Rn) = K를 얻습니다.
이러한 방식으로 우리는 관성 없는 연결을 얻었으며 이는 센서가 이 연결에 해당하는 모든 주파수 및 시간 특성을 가짐을 의미합니다.
등가 회로
2. 활성 구성 요소가 있는 유도 부하.
U = RvnIn + L(dIn/dt) + RnIn
라플라스 변환을 적용하면 Uoutx(p) = In(p) [(Rvn + pL) + Rn]을 얻습니다.
변환을 통해 W(p) = K / (Tp + 1) 형식의 전달 함수에 도달할 수 있습니다.
여기서 K = K1 / (Rvn + Rn)
T = L / (Rvn + Rn);
전위차계 센서의 내부 노이즈
 그림과 같이 브러시가 차례대로 이동함에 따라 출력 전압이 갑자기 변경됩니다. 스테핑에 의해 생성된 오류는 전달 함수의 출력 전압에 중첩된 톱니파 전압의 형태입니다. 소음이다. 브러시가 진동하면 움직임으로 인해 노이즈(간섭)도 발생합니다. 진동 소음의 주파수 스펙트럼은 오디오 주파수 범위에 있습니다.
그림과 같이 브러시가 차례대로 이동함에 따라 출력 전압이 갑자기 변경됩니다. 스테핑에 의해 생성된 오류는 전달 함수의 출력 전압에 중첩된 톱니파 전압의 형태입니다. 소음이다. 브러시가 진동하면 움직임으로 인해 노이즈(간섭)도 발생합니다. 진동 소음의 주파수 스펙트럼은 오디오 주파수 범위에 있습니다.
진동을 제거하기 위해 팬터그래프는 함께 접힌 길이가 다른 여러 와이어로 만들어집니다. 그러면 각 와이어의 고유 주파수가 달라지므로 기술적 공진이 발생하지 않습니다. 열 잡음 수준은 낮으며 특히 민감한 시스템에서 고려됩니다.
기능성 전위차 센서
자동화에서 기능 전달 함수는 종종 비선형 종속성을 얻기 위해 사용되며 세 가지 방식으로 구성됩니다.
-
코일을 따라 와이어의 직경을 변경합니다.
-
코일 피치 변경;
-
특정 구성의 프레임 사용;
-
다양한 크기의 저항으로 선형 전위차계 섹션을 조작하여.
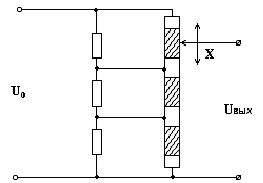
예를 들어 세 번째 방법에 따라 2차 종속성을 구하려면 그림과 같이 프레임의 너비를 선형으로 변경해야 합니다.
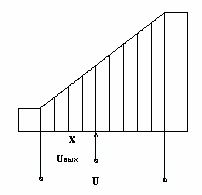
기능성 전위차계 센서
다회전 전위차계
기존 전위차계 센서는 작동 범위가 제한되어 있습니다. 그 값은 프레임의 기하학적 치수와 코일 회전 수에 의해 결정됩니다. 그들은 무한정 증가할 수 없습니다. 따라서 다중 회전 전위차계 센서는 저항 요소가 여러 회전으로 나선형으로 꼬인 응용 프로그램을 찾았으며 모터가 코일의 한쪽 끝에서 다른 쪽 끝으로 이동하도록 축을 여러 번 회전해야 합니다. 이러한 센서의 전기적 범위는 3600의 배수입니다.
다중 회전 전위차계의 주요 이점은 높은 분해능과 정확도이며, 이는 전체 치수가 작은 저항 요소의 긴 길이로 인해 달성됩니다.
광전위차계
광전위차계 - 저항층이 있는 기존 전위차계의 비접촉식 유사체이며 기계적 접촉이 광전도성으로 대체되어 신뢰성과 서비스 수명이 증가합니다. 광전위차계의 신호는 슬라이더 역할을 하는 라이트 프로브에 의해 제어됩니다. 이것은 특수 광학 장치에 의해 형성되며 광전도성 층을 따라 외부 기계적 작용의 결과로 변위될 수 있습니다. 광층이 노출되는 지점에서 (어두울 때보다) 과도한 광전도성이 발생하고 전기적 접촉이 이루어집니다.
광전위차계는 목적에 따라 선형과 기능으로 나뉩니다.
기능적 광전위차계는 광원의 공간적 움직임이 프로파일링된 저항 층(쌍곡선, 지수, 대수)으로 인해 주어진 기능적 형태를 가진 전기 신호로 변환되도록 합니다.