기술 매개변수 센서 - 힘, 압력, 토크
기술 프로세스의 자동화되고 매우 정확한 제어를 구현하려면 항상 핵심 기술 매개변수의 현재 값에 대한 정보를 마음대로 사용할 수 있어야 합니다. 일반적으로 이러한 목적을 위해 힘, 압력, 토크 등 다양한 센서가 사용됩니다. 세 가지 유형의 센서를 살펴보고 작동 원리를 이해합시다.

우선, 우리는 힘 또는 토크 센서의 구성에서 민감한 요소가 사용되며 특정 속성은 하나 또는 다른 외부 영향으로 인한 현재 변형 정도에 따라 변경된다는 점에 주목합니다.
이들은 탄성 금속판, 스프링 또는 샤프트가 될 수 있으며 변형이 자기 변형, 압전 또는 반도체 요소로 전달되며 전기 또는 자기 매개 변수는 변형 정도에 직접적으로 의존합니다. 변형의 크기와 그에 따른 힘(압력, 토크)에 대한 아이디어를 얻으려면 이 매개변수를 측정하는 것으로 충분할 것입니다.
텐소메트릭 스트레인 게이지

기반으로 하는 가장 간단한 스트레인 게이지 스트레인 게이지 와이어 컨버터 변형을 받는 기계적 탄성 요소와 변형이 전기 신호로 직접 변환되는 스트레인 게이지가 부착되어 있습니다.
얇은(직경 15~60미크론) 니크롬, 콘스탄탄 또는 엘린바 와이어는 뱀 모양으로 접혀 필름 뒷면에 고정되어 스트레인 게이지 센서 역할을 합니다. 이러한 변환기는 변형을 측정할 표면에 접착됩니다.
기계적 탄성 요소의 변형은 와이어의 길이를 따라 늘어나거나 압축되는 반면 단면적이 감소하거나 증가하여 전류에 대한 변환기의 저항 변화에 영향을 미칩니다.
이 저항(전압 강하)을 측정함으로써 변형된 요소의 기계적 매개변수가 알려진 경우 기계적 변형의 크기와 그에 따른 힘에 대한 아이디어를 얻습니다.
압력 게이지 토크 센서

힘 모멘트를 측정하기 위해 스프링 또는 얇은 샤프트 형태의 민감한 탄성 요소가 사용되며 기술 프로세스 중에 꼬입니다. 스프링의 시작과 끝의 상대적인 각도인 탄성 각도 변형을 측정하여 전기 신호로 변환합니다.
탄성 요소는 일반적으로 한쪽 끝이 고정된 튜브에 둘러싸여 있고 다른 쪽 끝은 튜브 끝과 변형 요소 사이의 발산 각도를 측정하는 각도 변위 센서에 연결됩니다.
따라서 토크의 크기에 대한 정보를 전달하는 신호가 얻어집니다.스프링에서 신호를 제거하기 위해 스트레인 저항 요소의 전선이 슬립 링으로 브러시에 연결됩니다.
자왜력 센서
스트레인 게이지 자왜 변환기가 있는 힘 센서도 있습니다. 여기에서 사용 역자기 변형 현상(Villari 효과), 이는 철-니켈 합금(예: 퍼멀로이드)으로 만들어진 코어에 압력이 가해지면 투자율이 변한다는 사실로 구성됩니다.
코어의 종 방향 압축은 확장으로 이어집니다. 히스테리시스 루프, 루프의 기울기가 감소하여 각각 자기 투자율 값이 감소하여 센서 권선의 인덕턴스 또는 상호 인덕턴스가 감소합니다.
자기 특성은 비선형이고 온도의 영향을 크게 받기 때문에 보상 회로를 사용해야 합니다.
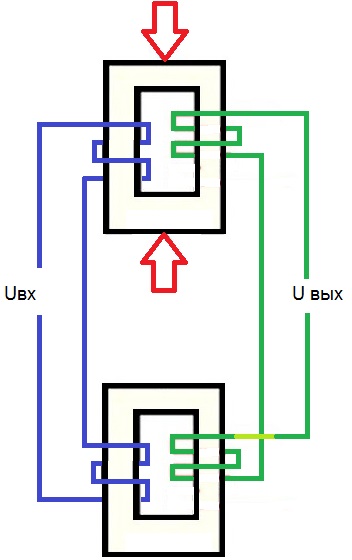
보상에는 다음과 같은 일반적인 체계가 적용됩니다. 니켈-아연 페라이트로 만들어진 폐쇄형 자왜 자기 코어에 측정 가능한 힘이 가해집니다. 이러한 코어는 힘 압력을 받지 않지만 두 와이어의 권선이 서로 연결되어 있으므로 총 EMF의 변화가 발생합니다.
1차 권선은 동일하고 직렬로 연결되며 10kHz 이내의 주파수를 가진 교류에 의해 전원이 공급되는 반면 2차 권선(역시 동일)은 반대로 켜지고 변형력이 없을 때 총 EMF는 다음과 같습니다. 0. 첫 번째 코어의 압력이 증가하면 출력의 총 EMF는 0이 아니며 변형에 비례합니다.