주파수 변환기의 작동 원리 및 사용자 선택 기준
 비동기 전기 모터용 제어 장치로 주파수 변환기를 선택하기 위한 목적, 작동 원리 및 기준에 대한 간략한 설명.
비동기 전기 모터용 제어 장치로 주파수 변환기를 선택하기 위한 목적, 작동 원리 및 기준에 대한 간략한 설명.
농형유도전동기 오늘날 그것은 다양한 기계와 메커니즘을 제어하기 위한 가장 방대하고 신뢰할 수 있는 장치입니다. 그러나 모든 메달에는 뒷면이 있습니다.
유도 전동기의 두 가지 주요 단점은 간단한 로터 속도 제어, 매우 큰 시동 전류 — 공칭의 5, 7배. 기계적 제어 장치만 사용하는 경우 이러한 단점으로 인해 큰 에너지 손실과 충격적인 기계적 부하가 발생합니다. 이는 장비의 서비스 수명에 매우 부정적인 영향을 미칩니다.
주파수 변환기

주파수 변환기 펄스 폭 제어(PWM이 있는 PE)를 사용하면 돌입 전류가 4-5배 감소합니다. 유도 전동기의 부드러운 시작을 제공하고 주어진 전압/주파수 비율에 따라 드라이브를 제어합니다.
주파수 변환기는 최대 50%의 에너지 절감 효과를 제공합니다. 인접 장치 간의 피드백을 허용하는 것이 가능해집니다. 작업에 대한 자체 조정 장비 및 전체 시스템의 작동 조건 변경.
주파수 변환기의 작동 원리
PWM 주파수 변환기는 이중 변환 인버터… 먼저 주전원 전압 220 또는 380V가 입력 다이오드 브리지에 의해 정류된 다음 커패시터를 사용하여 평활화 및 필터링됩니다.
이것은 변형의 첫 번째 단계입니다. 제어 마이크로 회로와 출력 브리지를 사용하여 정전압에서 두 번째 단계에서 IGBT 스위치, 특정 주파수 및 듀티 사이클을 갖는 PWM 시퀀스가 형성됩니다. 주파수 변환기의 출력에서 직사각형 펄스 패킷이 발생하지만 유도 전동기의 고정자 권선 인덕턴스로 인해 통합되어 최종적으로 정현파에 가까운 전압으로 바뀝니다.
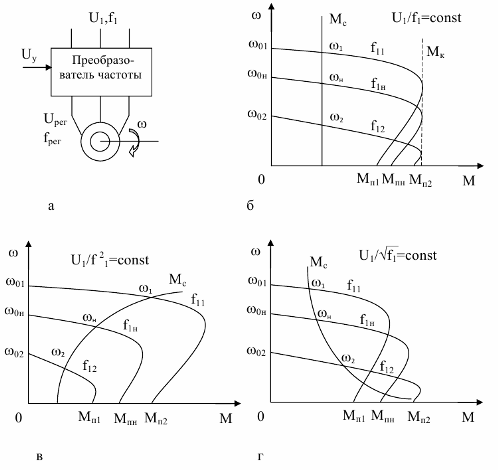 속도의 주파수 조절이 있는 비동기 전기 모터의 기계적 특성: a - 연결도; b - 일정한 정적 저항 모멘트를 갖는 부하에 대한 특성; c - 팬 부하 특성; d - 회전 각속도에 반비례하는 정하중 토크 특성.
속도의 주파수 조절이 있는 비동기 전기 모터의 기계적 특성: a - 연결도; b - 일정한 정적 저항 모멘트를 갖는 부하에 대한 특성; c - 팬 부하 특성; d - 회전 각속도에 반비례하는 정하중 토크 특성.
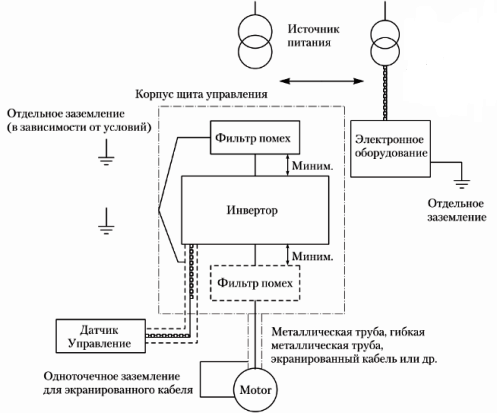 주파수 변환기를 켜기 위한 일반적인 회로
주파수 변환기를 켜기 위한 일반적인 회로 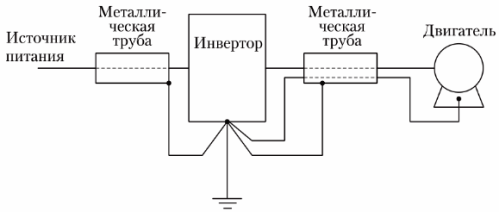 주파수 변환기 회로에서 전원 라인(케이블)을 연결하는 예
주파수 변환기 회로에서 전원 라인(케이블)을 연결하는 예
주파수 변환기 선택 기준

제어 방법으로
전력, 성능 유형, 과부하 용량 등의 측면에서 적합하지 않은 변환기는 즉시 폐기하십시오. 관리 유형에 따라 무엇을 선택해야할지 결정해야하며, 스칼라 또는 벡터 제어.
대부분의 최신 주파수 변환기는 벡터 제어를 구현하지만 이러한 주파수 변환기는 스칼라 주파수 변환기보다 비쌉니다.
벡터 제어는 정적 오류를 줄임으로써 보다 정밀한 제어를 가능하게 합니다. 스칼라 모드는 출력 전압과 출력 주파수 간의 일정한 비율만 지원하지만 예를 들어 팬의 경우 이 정도면 충분합니다.
처음부터 벡터 제어는 유도 전동기에 대한 매우 인기 있는 제어 전략이 되었습니다. 현재 대부분의 주파수 변환기는 벡터 제어 또는 센서리스 벡터 제어를 구현합니다(이 추세는 원래 스칼라 제어를 구현하고 속도 센서를 연결하기 위한 단자가 없는 주파수 변환기에서 발견됨).
벡터 제어의 기본 원리는 샤프트의 기계적 토크가 비례하는 모터의 자화 전류와 직교 전류의 별도의 독립적인 조절로 구성됩니다. 자화 전류는 회전자 제로 자속 쇄교의 값을 결정하고 일정하게 유지됩니다.
속도가 안정화되면 원하는 모터 속도와 측정된 모터 속도 간의 불일치를 입력하는 별도의 PI 컨트롤러를 사용하여 직교 전류 설정점이 생성됩니다. 따라서 직교 전류는 항상 최소 수준으로 설정되어 설정된 속도를 유지하기에 충분한 기계적 토크를 제공합니다. 따라서 벡터 제어는 에너지 효율이 높습니다.
전원을 통해
장비의 전력이 거의 같으면 최대 부하의 전력에 따라 용량이 같은 회사의 변환기를 선택하십시오. 이것은 호환성을 보장하고 장비 유지 보수를 단순화합니다. 선택한 주파수 변환기의 서비스 센터는 귀하의 도시에 있는 것이 좋습니다.
주 전압을 통해
항상 최대 및 최대 전압 범위가 가장 넓은 컨버터를 선택하십시오. 사실 지역 네트워크의 경우 표준이라는 단어 자체가 눈물을 통해 웃음을 가져올 수 있습니다. 낮은 전압으로 인해 주파수 변환기가 정지할 가능성이 높으면 증가된 전압으로 인해 주전원 전해 커패시터가 폭발하고 장치의 입력이 실패할 수 있습니다.
주파수 조정 범위별

제어 입력 수에 따라
제어 명령(시작, 정지, 역방향, 정지 등)을 입력하려면 이산 입력이 필요합니다. 피드백 신호(작동 중 드라이브 설정 및 설정)에는 아날로그 입력이 필요합니다. 디지털 속도 및 위치 센서의 고주파 신호를 입력하려면 디지털 입력이 필요합니다(인코더). 입력의 수는 결코 너무 클 수 없지만 입력이 많을수록 시스템을 더 복잡하게 구축할 수 있고 비용도 더 많이 듭니다.
출력 신호 수에 따라
이산 출력은 다양한 이벤트(경보, 과열, 레벨 초과 또는 미만 입력 전압, 오류 신호 등)에 대한 신호를 출력하는 데 사용됩니다. 아날로그 출력은 복잡한 피드백 시스템을 구축하는 데 사용됩니다. 선택 권장 사항은 이전 단락과 유사합니다.
제어 버스
주파수 변환기를 제어할 장비는 선택한 주파수 변환기와 동일한 버스 및 입/출력 수를 가져야 합니다. 향후 업그레이드를 위해 입력 및 출력을 위한 공간을 남겨두십시오.
보증 기간 내
보증 기간을 통해 주파수 변환기의 신뢰성을 간접적으로 평가할 수 있습니다. 당연히 장기적인 계획이 있는 주파수 변환기를 선택해야 합니다.일부 제조업체는 보증이 적용되지 않는 손상 사례를 특별히 제공합니다. 항상 설명서를 주의 깊게 읽고 온라인에서 장비 모델 및 제조업체 리뷰를 검색하십시오. 이렇게 하면 올바른 선택을 하는 데 도움이 됩니다. 양질의 서비스와 직원 교육을 위해 돈을 아끼지 마십시오.
 스탠드의 주파수 변환기
스탠드의 주파수 변환기
과부하 용량
첫 번째 근사치로 주파수 변환기의 출력은 모터 출력보다 10-15% 더 높게 선택해야 합니다. 컨버터의 전류는 모터의 정격 전류보다 높아야 하며 가능한 과부하 전류보다 약간 높아야 합니다.
특정 메커니즘에 대한 설명에는 일반적으로 과부하 전류와 흐름 지속 시간이 표시됩니다. 문서를 읽어보세요! 이렇게 하면 즐거움을 유지하고 향후 장비 손상을 방지할 수 있습니다. 드라이브에 충격(피크) 부하(2-3초 동안의 부하)가 있는 경우 피크 전류에 대한 변환기를 선택해야 합니다. 다시 10% 마진을 가져갑니다.
이 주제에 대해서도 다음을 참조하십시오. VLT AQUA 펌프 장치용 드라이브 주파수 변환기