인코더 - 회전 각도 센서
 엔코더(또는 각도 센서)와 같은 단순한 장치를 사용하여 다양한 유형의 산업 장비에서 위치 지정을 제공합니다.
엔코더(또는 각도 센서)와 같은 단순한 장치를 사용하여 다양한 유형의 산업 장비에서 위치 지정을 제공합니다.
인코더는 선형 또는 회전 운동을 이진 디지털 신호로 변환하는 데 사용됩니다. 인코더는 샤프트가 연구 대상 물체의 회전 샤프트에 연결되어 있고 후자의 회전 각도를 전자적으로 제어하는 장치입니다. 작동 원리에 따라 엔코더는 광학식과 자기식으로 나뉩니다.
광학 인코더의 샤프트에는 LED와 포토트랜지스터가 있는 경계 주변에 간헐적인 창이 있는 디스크가 있습니다. 직사각형 펄스열 창의 수와 디스크/샤프트의 회전 속도에 비례하는 주파수를 사용합니다. 펄스 수는 회전 각도를 나타냅니다.
옵티컬 엔코더는 증분형 및 절대형 엔코더로 사용할 수 있습니다.
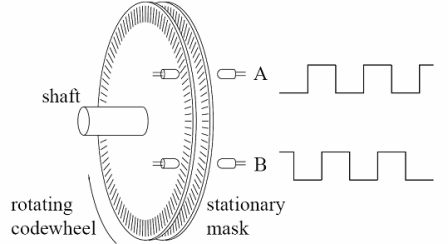
증분형 엔코더에는 기본 반경과 두 개의 판독값과 동일한 크기의 창이 여러 개 있는 간헐적 디스크가 있습니다. 옵토커플러, 샤프트의 회전 각도와 회전 방향을 모두 고정할 수 있습니다.디스크의 추가 반경에는 단일 브레이크 창과 시작 위치(홈)를 정의하는 해당 옵토커플러가 있습니다.
네거티브 토크 - 증분형 엔코더는 회전 각도의 상대적 판독값을 제공하며, 회전이 중지될 때 정보가 저장되지 않습니다. 그들의 장점은 고해상도 및 높은 작동 주파수에서 설계의 단순성(따라서 저렴한 비용)을 포함합니다.
내구성이 향상된 증분형 엔코더는 기계 공학, 압연기, 조선, 섬유, 신발, 목공과 같은 산업 응용 분야에 중점을 둡니다. 이러한 엔코더의 경우 결정적인 매개변수는 회전 각도의 분해능, 고주파에서 작동하는 기능, 열악한 환경 조건을 견딜 수 있는 높은 수준의 보호입니다.
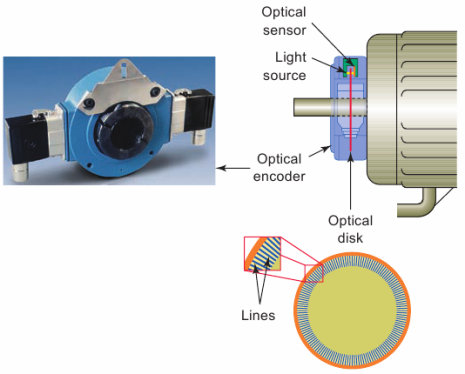
광학 센서로 가는 광선을 방해하는 선이나 노치가 있는 디스크입니다. 전자 회로는 빔 파손을 감지하고 인코더에서 디지털 출력 펄스를 생성합니다.
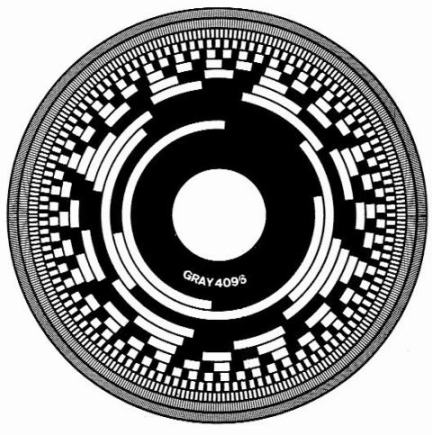
인코딩 디스크 — 샤프트의 각도 변위를 디지털 형식으로 변환하는 장치입니다. 디지털 코드의 기하학적 이미지가 인코딩 디스크에 적용됩니다. 코드 비트 심볼은 동심 트랙에 적용되며 최하위(덜 중요) 비트는 주변에 더 가깝게 위치합니다.
코드를 읽는 방식(접촉, 광전, 전자기, 유도, 정전기 등)에 따라 코드의 기하학적 이미지는 전기 전도성과 전기 절연성, 투명과 불투명, 자성과 비자성 등으로 구성됩니다.
가장 널리 퍼진 것은 별도의 이산 섹션의 경계를 넘을 때, 경계의 한쪽에서 일부 비트를 읽을 수 있고 다른 쪽에서 일부 비트를 읽을 수 있는 경우(부정확한 설치로 인해) 오류 발생을 배제하는 다양한 이진 코드가 있는 인코딩 디스크였습니다. 이동식 장치 또는 디스크가 회전하는 동안 비 동시 읽기 코드로 인해 이러한 코드에는 소위 Fau 코드(Barker 코드) 및 Reflex 코드(Grey 코드)가 포함됩니다.
일부 광학 로터리 엔코더는 반사형 엔코더 디스크를 사용합니다. 이 디스크에는 빛을 흡수하거나 반사하는 교차 섹션이 있으며 수신기와 함께 광원은 디스크의 한쪽에 있습니다. 광원과 수신기가 하나만 있는 경우 센서의 일련의 펄스를 통해 디스크가 이전 위치에 비해 몇 단계 회전했는지 확인할 수 있습니다.
센서는 회전 방향을 알 수 없지만 두 번째 소스-수신기 쌍(첫 번째 쌍과 90° 위상차)을 추가하면 마이크로 컨트롤러는 사이의 위상 차이로 디스크의 회전 방향을 결정할 수 있습니다. 펄스 트레인.
디스크의 상대 회전을 감지하지만 디스크의 절대 각도 위치를 측정할 수 없는 모든 시스템은 증분 인코더라는 점을 기억해야 합니다.
앱솔루트 엔코더에는 상대 크기가 이진 코드에 의해 결정되고 동시에 판독되는 서로 다른 반경의 동심원 창이 있는 불연속 디스크가 있어 각 각도 위치(그레이 코드, 이진 코드...)에 대해 코딩된 출력 신호를 제공합니다.
이 경우 디지털 카운터 없이 샤프트의 순간 위치에 대한 데이터를 얻거나 초기 위치로 돌아갈 수 있습니다. 출력에는 전기 노이즈로부터 보호되는 «n 비트»라는 코드 단어가 있기 때문입니다.
앱솔루트 엔코더는 입력 데이터를 장기간 저장해야 하는 애플리케이션에 사용되지만 설계가 복잡하고 비용이 많이 듭니다.
필드버스 인터페이스가 있는 앱솔루트 엔코더에는 CANopen, ProfiBus, DeviceNet, Ethernet, InterBus 표준에 따른 필드버스 통신을 위한 출력 인터페이스가 있으며 바이너리 코드를 사용하여 회전 각도를 결정합니다. 위의 통신 인터페이스는 예를 들어 회전 방향, 회전당 펄스 분해능, 전송 속도와 같은 여러 매개 변수에 따라 프로그래밍할 수 있습니다.

모터 샤프트에 장착된 엔코더는 정밀한 위치 제어를 효과적으로 제공합니다. 이러한 엔코더는 일반적으로 «홀» 버전으로 생산되며 특수 커플링은 모터 샤프트의 백래시를 보상할 수 있는 설계의 중요한 요소입니다.
위의 조건에서 포지셔닝하는 것이 자기 엔코더를 가장 효과적으로 제공하며, 샤프트의 각 변위를 전자 신호로 변환하는 것이 홀 효과를 기반으로 비접촉식으로 수행되며 내부 광 초퍼의 회전과 관련이 없습니다. 최대 60,000rpm의 속도로 신호 처리가 가능합니다.
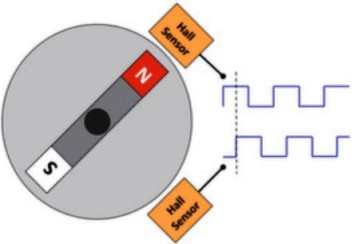
마그네틱 엔코더에서 영구 원통형 자석이 고정된 외부 샤프트의 고속 회전은 신호 처리 컨트롤러가 있는 단일 반도체 크리스탈에 결합된 홀 센서에 의해 감지됩니다.
영구 자석의 극이 미소 회로 위에서 회전할 때 홀 센서 가변 자기 유도 벡터는 샤프트 회전 각도의 순간 값에 대한 정보를 포함하는 홀 전압을 유도합니다. 마이크로컨트롤러는 홀 전압을 포지셔닝 각도 매개변수로 빠르게 변환합니다.

자석과 홀 센서 요소를 기계적으로 직접 연결하지 않고 변환할 수 있다는 점은 자기 인코더의 주요 장점이며 높은 신뢰성과 내구성을 제공하고 산업 자동화, 인쇄, 금속 가공과 관련된 고속 응용 분야에서 효율적으로 작동할 수 있도록 합니다. , 측정 및 측정 장비.