주요 크레인 메커니즘의 엔진에 대한 정적 하중
부하를 들어 올리는 정적 모드에서 크레인 호이스트 모터 샤프트의 동력 및 토크는 다음 공식으로 계산할 수 있습니다.
여기서 P는 모터 축 동력, kW입니다. G는 하중을 들어 올리는 데 필요한 힘 N입니다. G0 - 파지 장치의 양력, N; M은 모터 샤프트 모멘트, Nm입니다. v는 하중을 들어 올리는 속도, m / s입니다. D는 견인 윈치 드럼의 직경, m입니다. η - 리프팅 메커니즘의 효율성 i는 기어박스와 체인 호이스트의 기어비입니다.
하강 모드에서 크레인 엔진은 마찰력 Ptr과 하강 하중 Pgr의 무게 작용으로 인한 동력의 차이와 동일한 동력을 발생시킵니다.
중하중 및 중하중을 내릴 때 Pgr >> Ptr(브레이크 해제) 때문에 기어 샤프트에서 모터로 에너지가 전달됩니다. 이 경우 모터 축 동력 kW는 다음 공식으로 표현됩니다.

경하중이나 빈 훅을 내릴 때 Pgr < Ptr인 경우가 있습니다.이 경우 엔진은 이동의 순간(동력 강하)으로 작동하고 출력, kW,

주어진 공식에 따라 후크의 모든 부하에서 크레인 모터의 동력을 결정할 수 있습니다. 계산할 때 메커니즘의 효율성은 부하에 따라 달라진다는 점을 기억해야 합니다(그림 1).
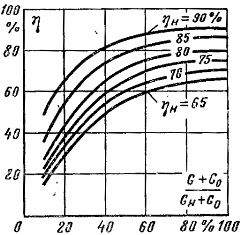
쌀. 1. 부하에 대한 메커니즘의 효율성 의존성.
정적 작동 모드에서 크레인 이동의 수평 메커니즘 모터 샤프트의 동력 및 토크는 공식에 의해 결정될 수 있습니다.

여기서 P는 크레인 이동 메커니즘의 모터 축 동력, kW입니다. M은 이동 메커니즘의 모터 샤프트 모멘트, Nm입니다. G - 운송 화물의 중량, N; G1 - 이동 메커니즘의 자체 중량, N; v - 이동 속도, m / s; R은 휠의 반경, m입니다. r은 휠 축 목의 반경, m입니다. μ - 슬라이딩 마찰계수(μ = 0.08-0.12); f - 롤링 마찰 계수, m(f = 0.0005 - 0.001m) η - 이동 메커니즘의 효율성 k - 레일에서 차륜 플랜지의 마찰을 설명하는 계수; i - 차대 감속기의 기어비.
많은 리프팅 및 운송 메커니즘에서 이동은 수평 방향으로 발생하지 않습니다. 풍하중 등의 영향도 가능합니다. 이 경우 전력을 결정하는 공식은 다음과 같이 나타낼 수 있습니다.

추가 표시: α — 수평면에 대한 가이드의 경사각; F - 특정 풍하중, N / m2; S는 풍압이 90 °, m2의 각도로 작용하는 영역입니다.
마지막 공식에서 첫 번째 항은 수평 이동 중 마찰을 극복하는 데 필요한 모터 축 동력을 나타냅니다. 두 번째 항은 양력에 해당하고 세 번째 항은 풍하중의 전력 구성 요소입니다.
많은 크레인에는 작업 장비가 있는 턴테이블이 있습니다. 플랫폼의 움직임은 직경 Dkp가 장착된 기어 휠(턴테이블)을 통해 전달됩니다. 플랫폼과 고정 베이스 사이에는 직경 dp의 롤러(롤러)가 있습니다. 이 경우 마찰력으로 인한 크레인 모터의 동력과 토크는 왕복 운동의 경우와 유사하게, 즉 다음과 같이 발견됩니다.

여기에서 알려진 값에 더하여 G2는 모든 장비가 있는 턴테이블의 무게 N입니다. ωl - 각속도, 플랫폼, rad/sec; in — 스윙 메커니즘 기어 박스의 기어비와 변속기의 구동 기어 — 턴테이블.

크레인 전기 드라이브의 동력을 결정할 때 경우에 따라 경사면에서 작업할 때 부하의 변화를 고려해야 합니다. 회전 메커니즘의 풍하중은 하중, 크레인 붐 및 균형추에 작용하는 풍하중의 차이를 고려하여 결정됩니다.
크레인 메커니즘을 위한 전기 드라이브를 설계할 때 모터 선택이 끝날 때 전기 드라이브가 허용 가능한 가속 값에 대해 확인되며 해당 데이터는 표 1에 나와 있습니다.
표 1 메커니즘의 이름과 목적
메커니즘의 이름과 목적 가속도, m / s2 액체 금속, 깨지기 쉬운 물체, 제품, 다양한 조립 작업을 들어 올리기위한 리프팅 메커니즘 0.1 조립 공원 및 야금 워크샵의 리프팅 메커니즘 0.2 — 0.5 그립 크레인의 리프팅 메커니즘 0.8 메커니즘 정밀 조립 작업 및 액체 금속, 깨지기 쉬운 물체의 운송을 위한 크레인의 이동 0.1 - 0.2 최대 중력 인력이 있는 이동 메커니즘 0.2 - 0.7 풀 그립 크레인 트롤리 0.8 — 1.4 크레인 스위블 0.5 — 1.2