동력에 의한 엘리베이터 및 리프팅 기계용 모터 선택
 주거 및 관리 건물의 현대식 여객 및화물 엘리베이터와 광산을 들어 올리는 일부 기계는 균형추 또는 때로는 균형추라고도합니다. 채광 기계에서 이미 언급한 바와 같이 균형 조정은 종종 균형추에 의해 수행되지 않고 두 번째 리프팅 선박에 의해 수행됩니다.
주거 및 관리 건물의 현대식 여객 및화물 엘리베이터와 광산을 들어 올리는 일부 기계는 균형추 또는 때로는 균형추라고도합니다. 채광 기계에서 이미 언급한 바와 같이 균형 조정은 종종 균형추에 의해 수행되지 않고 두 번째 리프팅 선박에 의해 수행됩니다.
엘리베이터의 균형추는 리프팅 용기(카)의 무게와 들어올려야 하는 공칭 하중의 일부의 균형을 맞추기 위해 선택됩니다.

여기서 GH는 공칭 리프팅 하중의 무게 N입니다. G0 — 캐빈 중량, N; Gnp는 카운터웨이트 N의 무게입니다. α는 균형 요소이며 일반적으로 0.4-0.6과 동일합니다.
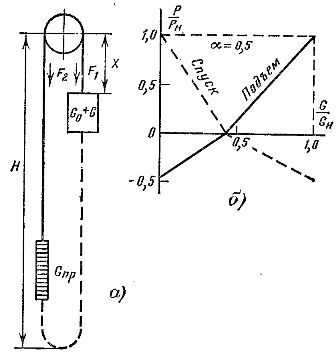
쌀. 1. 엘리베이터 모터 샤프트의 하중을 계산합니다.
무거운 선박의 균형을 잡아야 할 필요성은 명백합니다. 균형추가 없는 상태에서 선박을 이동하려면 이에 상응하는 엔진 출력 증가가 필요하기 때문입니다. 지정된 부하 곡선에 대한 등가 전력을 결정할 때 정격 페이로드의 일부를 균형 있게 조정하는 기능이 나타납니다.예를 들어 엘리베이터가 주로 화물을 올리고 공차를 내리는 작업을 수행하는 경우 부하 다이어그램에 따른 등가 엔진 출력은 α = 0.5에서 최소값을 가집니다.
카운터웨이트가 있으면 엔진의 부하 곡선이 평평해져 작동 중 발열이 줄어듭니다. 도 1에 도시된 다이어그램을 참조한다. 1, a, 카운터 웨이트의 무게 값으로

밸런싱 로프와 캐빈 마찰이 없고 가이드에 균형추가 없는 경우 다음과 같이 작성할 수 있습니다.


여기서 gk는 1m 로프의 무게, N / m입니다.
인장강도

모터 샤프트 토크 및 동력은 다음 공식에 따라 결정됩니다.
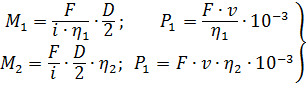
여기서 M1, P1 - 드라이브가 모터 모드에서 작동할 때의 토크 및 전력, 각각 Nm 및 kW; M2, P2 - 드라이브가 발전기 모드에서 작동할 때의 토크 및 전력, 각각 Nm 및 kW; η1, η2 — 직접 및 역방향 에너지 전달을 통한 웜기어 효율.
η1 및 η2의 값은 웜 샤프트의 속도에 따라 비선형적으로 달라지며 다음 공식으로 계산할 수 있습니다.
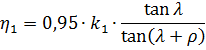

여기서 λ는 웜의 인덱싱 실린더에서 나선형 선의 상승 각도입니다. k1은 기어박스의 베어링 및 오일 수조의 손실을 고려한 계수입니다. ρ - 웜 샤프트의 회전 속도에 따른 마찰각.
트랙션 시브에 가해지는 힘의 공식으로부터 밸런싱 로프가 없을 때 리프팅 윈치의 전기 드라이브에 가해지는 부하는 리프팅 선박의 위치에 따라 달라집니다.
최대 10톤의 큰 적재 용량, 10m/s 이상의 높은 이동 속도, 200-1000m의 높은 리프팅 높이 및 열악한 작업 조건으로 인해 광산 리프팅 기계에는 질량이 큰 강철 로프가 장착되어 있습니다. 예를 들어 한 패스가 아래쪽 수평선으로 내려가고 다른 패스는 위에 있고 그 순간 언로드된다고 상상해보십시오. 이 위치에서 전체 헤드 로프는 균형이 맞지 않으며 상승 시작 시 모터는 하중과 로프의 무게로 인해 생성된 정적 모멘트를 극복해야 합니다. 로프 균형 조정은 스킵 경로 중간에서 이루어집니다. 그런 다음 다시 끊어지고 로프의 하강 부분의 무게가 엔진을 내리는 데 도움이 됩니다.
특히 깊은 광산에서 고르지 않은 하중은 엔진 출력을 과대 평가할 필요가 있으므로 리프팅 높이가 200-300m 이상인 경우 매달려 있는 테일 로프의 도움으로 헤드 리프팅 로프의 균형을 맞추는 것이 좋습니다. 리프팅 선박의. 일반적으로 테일 로프는 메인 로프와 동일한 단면과 길이로 선택되며 그 결과 리프팅 시스템이 균형을 이룹니다.
엘리베이터 및 리프팅 기계 작동 중에 부하가 변경되기 때문에 각 부하에 대한 모터 샤프트의 힘 또는 모멘트를 결정하기 위해 부하에 대한 이러한 값의 의존성을 그래프로 작성하는 것이 편리합니다. 여러 지점에서 그림과 거의 동일한 문자를 갖습니다. 1b를 참조한 다음 부하 다이어그램을 구성하는 데 사용합니다.
이 경우 리프팅 기계의 전기 드라이브 작동 모드를 알아야 하며 이는 주로 PV 활성화의 상대적 지속 시간과 모터의 시간당 시동 횟수에 의해 결정됩니다. 예를 들어 엘리베이터의 경우 전기 드라이브의 작동 모드는 설치 장소와 엘리베이터의 목적에 따라 결정됩니다.
주거용 건물에서 트래픽 일정은 상대적으로 일정하며 상대 지속 시간 - PV 및 모터 시작 주파수 h는 각각 시간당 40% 및 90-120 시작과 같습니다. 고층 오피스 빌딩에서는 직원의 출퇴근 시간에 엘리베이터 부하가 급격히 증가하므로 점심 시간에는 높은 값이 PV 및 h-40-60 % 및 150 -200 시간당 시작합니다.
그림이 완성된 후 모터 샤프트의 정하중, 전기 구동 시스템 및 호이스트 모터가 선택되면 부하 다이어그램에 대한 과도 현상의 영향을 고려하여 부하 다이어그램을 구성하는 두 번째 단계를 수행할 수 있습니다.
완전한 부하 다이어그램을 작성하려면 전기 드라이브의 가속 및 감속 시간, 도어 개폐 시간, 자동차 이동 중 정지 횟수, 시간을 고려해야 합니다. 가장 일반적인 작업 주기 동안 승객 출입 자동으로 작동되는 도어가 있는 엘리베이터의 경우 도어 작동과 카 채우기에 의해 결정되는 총 시간 손실은 6-8초입니다.
자동차의 공칭 속도와 가속(감속) 및 저크의 허용 값을 알면 모션 다이어그램에서 자동차의 가속 및 감속 시간을 결정할 수 있습니다. 전기 구동 시스템의 표시된 정적 및 동적 모드에 따라 구축된 부하 다이어그램에 따르면 잘 알려진 방법 중 하나인 평균 손실 또는 등가 값을 사용하여 가열될 때 모터의 전산 계산을 수행해야 합니다.
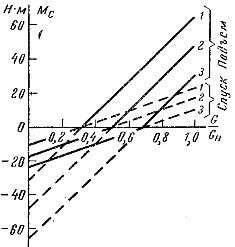
쌀. 2. 엘리베이터가 1층(1), 샤프트 중간(2) 및 마지막 층(3)에 있을 때 카, 엘리베이터의 부하에 대한 전기 드라이브의 토크 의존성.

예. 고속 승객용 엘리베이터의 기술 데이터에 따라 다양한 작동 모드에서 모터 샤프트의 정적 모멘트를 결정합니다.
주어진:
• 최대 부하 용량 Gn = = 4900N;
• 이동 속도 v = 1m/s;
• 리프팅 높이 H = = 43m;
• 캐빈 중량 G0 = 6860 N;
• 균형추 Gnp = 9310 N;
• 견인 빔의 직경 Dm = 0.95m;
• 윈치 기어박스의 변속비 i = 40;
• 샤프트 가이드의 캐빈 마찰을 고려한 전송 효율 η = 0.6;
• 로프의 무게 GKAH = 862 N.
1 번 테이블

장력 강도:


엘리베이터 시스템이 작동할 때 Fc > 0일 때 구동 전기 기계는 모터 모드에서 작동하고 Fc가 0일 때, Fc < 0일 때 모터 모드에서 작동합니다.
공식에 따른 정적 모멘트 계산 결과를 표로 요약했습니다. 1 및 도 1의 그래프에 도시되어 있다. 2.보다 정확한 계산을 위해서는 Fc의 5-15%인 샤프트 가이드의 움직임에 대한 저항을 고려해야 합니다.