위상 측정기 및 싱크로스코프
 위상 측정기는 예를 들어 교류를 유발하는 전압에 대한 교류의 위상 각을 결정하는 데 사용됩니다.
위상 측정기는 예를 들어 교류를 유발하는 전압에 대한 교류의 위상 각을 결정하는 데 사용됩니다.
위상 측정기의 측정 메커니즘의 고정 부분에는 세 개의 코일이 포함되며 그 중 두 개는 1과 2가 프레임 모양입니다. 그들은 120 °의 각도로 서로에 대해 이동합니다 (그림 1, a). 원통형 코일(3)은 가동부와 동축으로 코일(1, 2) 내부에 위치한다.
가동 부분은 축 4에 의해 형성되며, 그 끝에는 얇은 판 형태의 코어 5가 부착되어 있으며 서로 180 ° 오프셋되고 꽃잎이라고합니다. 축과 꽃잎은 연자성 재질로 Z자형 구조를 이룬다(Fig. 1,b). 측정 메커니즘에는 스프링에 의해 생성된 반대 모멘트가 없으므로 문제의 장치는 비율에 기인할 수 있습니다.
무화과에서. 2는 위상계를 켜는 방식을 보여줍니다. 권선 1과 2는 3상 라인의 2개 와이어의 절단에 포함되며 권선 3은 상당한 활성 저항을 갖는 저항 Rd와 직렬로 연결되어 주전원 전압에 연결됩니다.이 권선을 통해 흐르는 선형 전류는 마치 부하 전류 벡터를 나타내는 것처럼 권선 1과 2가 회전 자속 Ф12를 생성하는 것과 관련하여 서로 위상이 120 °만큼 이동합니다. 회전 빈도는 전류의 주파수에 따라 다릅니다. I1 과 나는2... 한 기간 동안 흐름 F12는 한 바퀴를 완전히 돌립니다.
코일(3)의 리액턴스에 비해 저항(Rq)의 저항이 크기 때문에 전류(Az3)는 선간전압과 위상이 같다. 코일 3은 정현파 전류 변화의 결과로 정현파에 가까운 맥동 자속 F3을 생성합니다. 이 흐름의 대칭축은 공간에 고정되어 있으며 항상 메커니즘의 움직이는 부분의 축과 일치합니다. 플럭스 F3은 이동 가능한 부분의 축 4, 꽃잎 및 고정된 외부 원통형 자기 회로를 따라 닫힙니다.
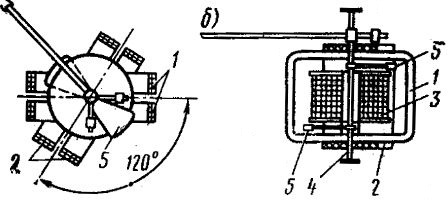
쌀. 1. Z형 코어 전자기 시스템 비율 측정 메커니즘
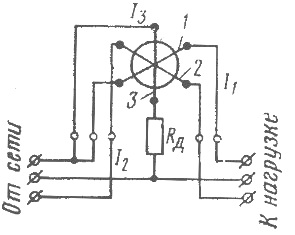
쌀. 2. 전자기 시스템의 위상계 회로도
플럭스 F12 및 F3은 서로 다른 평면에서 닫혀 측정 메커니즘의 움직이는 부분을 자화시킵니다. 플럭스 Ф12의 값은 일정하므로 플럭스 Ф3이 가장 큰 값을 통과하는 순간 축과 꽃잎의 자화는 가장 높은 값에 도달합니다. 관성력의 작용으로 가동부는 가장 큰 자화에 해당하는 위치, 즉 자속 Ф3이 최대값에 도달하는 순간 회전 자속 Ф12의 위치에 움직이지 않고 고정됩니다.
진폭 값을 통한 플럭스 Ф3 및 전류 Аз3이 통과하는 순간 장치의 고정 부분에 대한 회전 플럭스의 위치는 부하 전류 사이의 각도 φ 변화에 따라 달라집니다. 그리고 전압. 이를 감안할 때, 스케일에 대해 움직이는 부분(및 그에 따른 장치의 포인터)이 차지하는 위치, 즉 각도 α는 부하 전류와 전압 사이의 위상 편이를 나타냅니다.
이 원리로 작동하는 위상계는 용량성 및 유도성 부하로 위상 변이를 측정합니다. 장치의 스케일은 각도 값 φ 또는 cosφ... 첫 번째 경우에는 균일하고 두 번째 경우에는 고르지 않습니다.
파소미터 Ts302
싱크로노스코프
고려중인 측정 메커니즘은 병렬 작동을 위해 동기 발전기를 연결할 때 사용되는 장치인 싱크로스코프에도 사용됩니다.
싱크로 스코프를 켜는 다이어그램이 그림에 나와 있습니다. 삼.
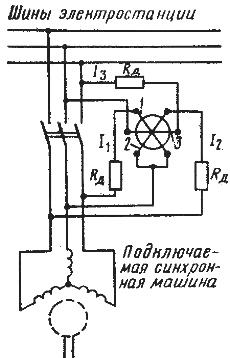
쌀. 3. 전자기 시스템의 싱크로 스코프 회로도
측정 메커니즘의 코일 1, 2 및 3의 구성은 위상 측정기의 해당 코일 구성과 유사하지만 권선 수가 많은 얇은 구리선으로 만들어져 코일이 상당한 저항을 가지고 있습니다. 코일 3은 네트워크의 라인 전압에 연결되고 코일 1과 2는 연결된 동기 기계의 라인 전압에 연결됩니다. 저항은 코일 R 등과 직렬로 연결됩니다.
언급한 바와 같이, 측정 메커니즘의 움직이는 부분은 움직이는 부분의 로브 축이 회전 필드 Ф12의 방향과 일치하도록 3개의 코일의 결과적인 자기장에 장착됩니다. 맥동장 F3의 진폭 값.
코일의 권선에서 전류의 동일한 주파수에서 움직이는 부분의 로브의 이 위치는 코일 1, 2의 권선에서 전류 I1과 Az2와 권선에서 전류 Az3 사이의 위상 편이에 따라 달라집니다. 코일 3. 전류 I1 및 Az2는 동기식 발전기의 라인 전압 및 전류 Az3과 주전원 전압(저항 Rq의 저항이 큼)과 실질적으로 위상이 일치합니다.
결과적으로 ° С 따라서 주전원 전류와 연결된 발전기의 주파수가 같을 때 싱크로 스코프의 표시 장치는 이러한 3 상 시스템의 라인 전압 사이의 위상 변이를 직접 나타냅니다.
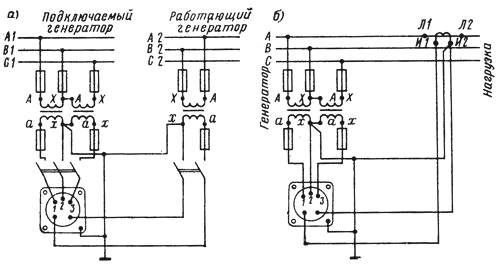
쌀. 4. 연결 다이어그램: a — 싱크로스코프, b — 전자기 시스템의 페이소미터

쌀. 5. 동기식 E1605 유형
동기화할 때 주전원 전류의 주파수와 연결된 발전기의 전류가 동일하지 않습니다. 이로 인해 라인 전압과 e 사이의 위상각이 지속적으로 변경됩니다. 등. v. 발전기 및 고정 코일에 대한 꽃잎 위치의 변화. 싱크로 스코프의 가동 부분은 임의의 각도로 회전할 수 있으므로 포인터가 회전합니다.
회전 방향은 전원과 연결된 발전기 사이의 주파수 차이의 부호에 따라 달라집니다. 이 차이가 작을수록 싱크로스코프 포인터의 회전 속도가 느려집니다.
장치의 스케일에는 전압 벡터의 역상 위치에 해당하는 부호가 있으며 e. 등.v. 동기화된 개체. e 벡터의 방독면 위치 동안 동기 기계는 스테이션 버스에 연결되어야 합니다. 등. pp. 및 버스 전압.
무화과에서. 도 4는 전자기 위상계의 배선도 및 전자기 싱크로스코프의 배선도를 도시한다.