전기 호이스트 및 크레인 빔의 전기 구동
 매달린 전기 트롤리(전기 호이스트, 호이스트 및 크레인 빔)는 산업 현장에서 조립 및 수리 작업 중에 화물 및 기계 부품을 들어 올리고 이동하는 데 사용됩니다. 전기 호이스트, 호이스트 및 크레인은 브리지 크레인보다 작기 때문에 산업 건물의 크기가 줄어들고 유지 관리에 자격을 갖춘 인력이 필요하지 않습니다.
매달린 전기 트롤리(전기 호이스트, 호이스트 및 크레인 빔)는 산업 현장에서 조립 및 수리 작업 중에 화물 및 기계 부품을 들어 올리고 이동하는 데 사용됩니다. 전기 호이스트, 호이스트 및 크레인은 브리지 크레인보다 작기 때문에 산업 건물의 크기가 줄어들고 유지 관리에 자격을 갖춘 인력이 필요하지 않습니다.
매달린 전기 트롤리는 엄격하게 정의된 경로를 따라 생산 시설에서 상품을 들어 올리고 이동하도록 설계되었습니다.
전기 트럭(그림 1)은 3가지 주요 부품으로 구성됩니다. 화물을 들어올리고(낮추고) 고정하도록 설계된 리프팅 메커니즘(전기 호이스트), 들어 올린 화물을 엄격하게 정의된 위치 방향으로 이동하도록 설계된 이동 메커니즘(하부 구성품) , 두 방향으로 수평 이동을 정의하는 모노레일.
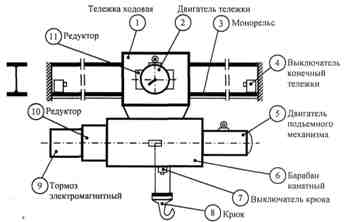
쌀. 1. 매달린 전동차의 기구학도
전기 호이스트는 작업 트롤리에 장착되며 리프팅 메커니즘의 전기 모터(5), 전기 모터의 회전 속도를 주어진 선형 속도를 제공하는 값으로 줄이기 위한 원통형 기어박스(10)와 같은 장비를 포함합니다. 후크를 들어 올리기 (내리기), 전자기 브레이크 (9), 주전원에서 분리되거나 네트워크에서 전압이 사라질 때 샤프트의 모터를 정지시키기 위해 제동 브레이크가 활성화되어 스프링의 힘에 작용합니다. 샤프트는 샤프트, 후크의 리미트 스위치(7)를 감싸고 후크의 리프팅을 제한하며 누르면 엔진이 네트워크에서 분리되고 속도가 느려집니다. 로프 드럼(6), 권선용( 풀림) 및 들어 올린 하중을 고정하기 위한 로프, 후크(8)를 보관합니다.
하부 구조는 모노레일(3)에 장착되며 이중 레일의 하단 플랜지에 있는 주행 바퀴로 지지됩니다. 전기 모터(2)로 원통형 기어박스(11)를 통해 바퀴를 구동합니다.
모노레일 — 수평 이동을 제한하기 위해 끝에 리미트 스위치(4)가 있는 I 빔.
전기 호이스트 TEP-1(부하 용량 1t, 전압 380V)은 개별 전기 드라이브가 있는 리프팅 및 이동 메커니즘으로 구성됩니다. 작업드럼(2)은 새틀라이트(5,7,8), 블록기어(13), 선기어(6,9), 캐리어(14,15)로 구성된 유성기어박스를 통해 엔진(20)에 의해 구동된다. 스프링 11의 작용에 따라 디스크 10에 의해.
6.5-6.9m/s의 속도로 리프팅 메커니즘을 구동하기 위해 AOS-32-4M 유형의 슬립이 증가된 비동기 모터가 사용됩니다(1320rpm에서 전력 1.4kW 및 듀티 사이클 = 25%).후크의 상향 이동은 리미트 스위치에 의해 제한됩니다.
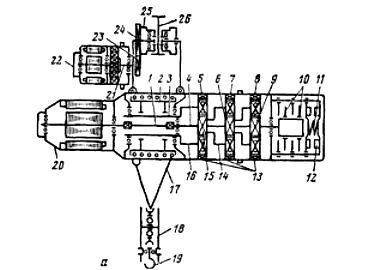
쌀. 2. 전기 호이스트 TEP -1의 전기 드라이브: 1 — 작동 드럼, 3 — 중공 샤프트, 4 — 작동 샤프트, 5, 7, 8 — 위성, 6, 9, 15 — 태양 기어, 10 — 브레이크 디스크, 11 — 브레이크 스프링, 12 — 전자석, 13 — 블록 기어, 14, 16, 21 — 캐리어, 17 — 케이블, 18 — 서스펜션, 19 — 후크, 20 — 부하 리프팅용 전기 모터, 22 — 트롤리 전기 모터, 23, 24 — 기어, 25 — 롤러, 26 — 모노레일.
그림 3은 호이스트의 작동을 보여줍니다. 전기 호이스트의 효율은 인양된 하중의 질량이 1000kg으로 증가함에 따라 0.58로 증가합니다.
부하를 낮출 때 모터 4의 흥미로운 작동 모드: 부하의 무게가 425kg 미만인 동안 전기 모터는 모터 모드에서 작동하고 질량이 425kg을 초과하면 발전기 모드에서 작동합니다. 따라서 리프팅 메커니즘의 유휴 모멘트를 극복하려면 425kg의 하중이면 충분합니다.
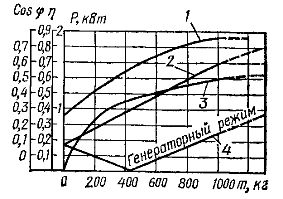
쌀. 3. 전기 호이스트의 작동 특성: 1 — 전기 모터의 sphi, 2 — 부하를 들어 올릴 때 전기 모터의 힘, 3 — 효율성, 4 — 부하를 내릴 때 전기 모터의 힘.
전기 호이스트의 차대를 구동하기 위해 유성 단일 스테이지 기어박스가 내장된 TEM-0.25 유형(1410rpm에서 전력 0.25kW 및 듀티 사이클 = 25%)의 비동기 전기 모터 22(그림 2) 및 기어 23, 24, 롤러 25의 회전 전달. 제동 장치는 가장 단순한 호이스트의 이동 메커니즘에 장착되지 않습니다. 양방향으로 빔을 따라 호이스트의 움직임은 기계적 정지 장치에 의해 제한됩니다.
 지브 크레인은 호이스트가 이동하는 빔이 농형 또는 위상 회전자 전기 모터로 구동되는 생산실 주변을 이동할 수 있다는 점에서 호이스트와 다릅니다. 전동식 구동기구를 갖춘 크레인 빔 브리지는 전동 차대가 움직이는 단일 빔 형태로 제작됐다.
지브 크레인은 호이스트가 이동하는 빔이 농형 또는 위상 회전자 전기 모터로 구동되는 생산실 주변을 이동할 수 있다는 점에서 호이스트와 다릅니다. 전동식 구동기구를 갖춘 크레인 빔 브리지는 전동 차대가 움직이는 단일 빔 형태로 제작됐다.
농형 회 전자가있는 3 상 비동기 모터는 선외 전기 자동차를 구동하는 데 사용되며 부하 용량이 높고 위상 회 전자가있는 부하 비동기 모터의 속도 조절 및 원활한 "착륙"이 필요합니다.
화물의 원활한 착륙이나 크레인의 정확한 정지에 필요한 저속 부족으로 인해 작업자는 주기적으로 전기 모터를 켜고 꺼야 하며, 이로 인해 시동 횟수가 증가하고 권선이 가열되며 또한 감소합니다. 접점의 내마모성. 따라서 일부 크레인에는 단일 속도 또는 추가 마이크로 드라이브 대신 2단 비동기 모터를 사용하여 제공되는 공칭 및 감소의 두 가지 작동 속도로 리프팅 및 이동을 위한 전기 드라이브가 있습니다.
 농형 모터로 구동되는 저속(0.2 - 0.5m/s) 현수식 전동 트롤리는 일반적으로 현수식을 사용하여 바닥(지상) 수준에서 제어됩니다. 푸시 버튼 스테이션… 작업자를 위한 캐빈이 있는 에어 트롤리 및 크레인(0.8 - 1.5m/s의 속도)에서 위상 회전자가 있는 모터는 컨트롤러에 의해 제어됩니다.
농형 모터로 구동되는 저속(0.2 - 0.5m/s) 현수식 전동 트롤리는 일반적으로 현수식을 사용하여 바닥(지상) 수준에서 제어됩니다. 푸시 버튼 스테이션… 작업자를 위한 캐빈이 있는 에어 트롤리 및 크레인(0.8 - 1.5m/s의 속도)에서 위상 회전자가 있는 모터는 컨트롤러에 의해 제어됩니다.
호이스트 및 오버헤드 크레인의 전기 모터는 다음에 의해 제어됩니다. 가역 마그네틱 스타터 유연한 외장 케이블에 매달린 시작 버튼.KM1 상승(그림 4), KM2 하강, KMZ 전진 및 후진 KM4를 위한 접촉기의 코일 및 접점에 대한 전압은 회로 차단기 및 케이블 또는 접촉 와이어를 통해 공급됩니다. 리프팅 장치의 상향 이동은 리미트 스위치에 의해 제한됩니다. 스퀘어
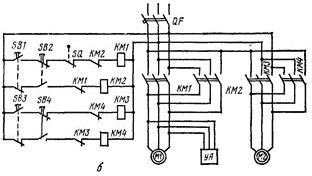
쌀. 4. 크레인 빔의 전기 개략도
모터의 반전 접촉기가 동시에 켜지지 않도록 차단하는 것은 이중 회로 버튼과 접촉기 자체의 기계적 차단(또는 접촉기의 보조 접점 개방)을 통해 수행됩니다.
전기 호이스트 및 오버헤드 크레인에서 시작 버튼은 해당 폐쇄 접촉기 인터록 접점에 의해 우회되지 않으므로 작업자가 푸시 버튼 펜던트 스테이션에서 손을 뗀 후에도 호이스트가 계속 작동하는 것을 방지합니다. 리프팅 모터와 동시에 UA 솔레노이드가 작동하여 브레이크가 열립니다.
리프팅 메커니즘의 최대 허용 시작 시간은 3 - 5초, 이동 메커니즘의 경우 - 10 - 15초입니다.
또한 다음을 볼 수 있습니다. 전기 장비 및 전기 호이스트 체인
전기 트럭, 전기 호이스트 및 오버헤드 크레인의 엔진 작동 모드는 목적에 따라 다릅니다. 상품이 짧은 거리에서 브리지 크레인으로 이동되면 엔진은 부끄러운 단기 모드로 작동합니다(예: 작업장 또는 창고 섹션을 제공하는 트롤리에서).

상대적으로 먼 거리에 걸쳐 공장 영역을 가로질러 상품을 운송하는 오버헤드 크레인의 경우 리프팅 및 이동 모터의 작동 모드가 다릅니다. 전기 호이스트, 호이스트 및 갠트리 크레인을 들어 올리고 이동하기 위한 모터는 오버헤드 크레인 메커니즘의 엔진과 동일한 방식으로 결정됩니다.