유도 전동기 권선 단계의 시작과 끝을 결정하는 방법
 전기 모터 고정자 권선의 라인 전압 및 다이어그램
전기 모터 고정자 권선의 라인 전압 및 다이어그램
예를 들어 전기 모터의 여권에 220/380V가 표시된 경우 이는 전기 모터를 220V 네트워크(권선 다이어그램 - 삼각형)와 380V 네트워크(코일 연결 다이어그램 - 별) 모두에 연결할 수 있음을 의미합니다. . 유도 전동기의 고정자 권선에는 6개의 끝이 있습니다.
GOST에 따르면 비동기 모터의 권선은 다음과 같이 지정됩니다. I 단계 - C1(시작), C4(끝), II 단계 - C2(시작), C5(끝), III 단계 - C3(시작), C6 (끝).
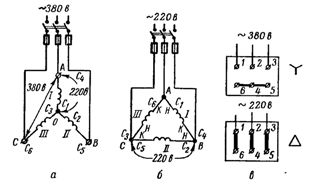
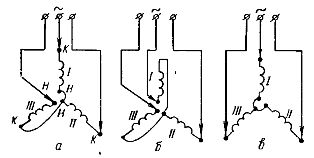
쌀. 1. 비동기식 모터 권선의 연결 방식: a — 별 모양, b — 삼각형 모양, c — 터미널 보드에 "별" 및 "델타" 방식 구현.
주전원 전압이 380V이면 모터의 고정자 권선을 별 모양으로 연결해야 합니다. 동시에 모든 시작(C1, C2, C3) 또는 모든 끝(C4, C5, C6)이 공통 지점에 모입니다.권선 AB, BC, CA의 끝 사이에 380V의 전압이 적용됩니다. 각 위상에서, 즉 점 O와 A, O와 B, O와 C 사이에서 전압은 √Z 배 적습니다: 380 / √Z = 220 V.

 전기 모터를 연결하는 방법
전기 모터를 연결하는 방법
전압이 220V인 경우(220/127V 전압 시스템을 사용하는 경우 현재로서는 거의 찾을 수 없음) 모터의 고정자 권선을 델타로 연결해야 합니다.
지점 A, B 및 C에서 이전 권선의 시작(H)은 다음 권선의 끝(K)과 네트워크의 위상에 연결됩니다(그림 1, b). I 단계가 포인트 A와 B 사이, 포인트 B와 C — II 사이, 포인트 C와 A — III 단계 사이에 포함되어 있다고 가정하면 "델타"방식으로 연결됩니다. 시작 I (C1)과 III(C6) 끝, I(C4) 끝으로 II(C2) 시작, II(C5) 끝으로 III(C3) 시작.
일부 모터에서는 권선 단계의 끝이 터미널 보드로 나옵니다. GOST에 따르면 권선의 시작과 끝은 그림 1, c와 같은 순서로 나옵니다.
이제 «스타» 방식에 따라 모터의 권선을 연결해야 하는 경우 끝(또는 시작)이 나오는 단자가 단락되고 네트워크의 위상이 모터에 연결됩니다. 시작(또는 끝)이 나오는 터미널.
모터 권선을 "델타"로 연결할 때 클램프는 수직으로 쌍으로 연결되고 주전원 위상은 점퍼에 연결됩니다. 수직 점퍼는 Iz를 시작하여 III 단계를 종료하고, II를 시작하여 Iz 단계를 종료하며, III을 시작하여 II 단계를 종료합니다.
권선의 연결 방식을 결정할 때 다음 표를 사용할 수 있습니다.
전기 모터의 여권에 표시된 전압, V
주전원 전압, V
127 220 380 127 / 220 삼각형 별 — 220 / 380 — 삼각형 별 380 / — — — 삼각형
전기 모터 여권
고정자 권선 위상의 정합 단자(시작 및 끝) 결정.
모터 고정자 권선의 단자에는 일반적으로 금속 러그에 대한 표준 표시가 있습니다. 그러나 이러한 팁은 손실됩니다. 그런 다음 합의된 결론을 확인해야 합니다. 이는 다음 순서로 수행됩니다.
먼저 테스트 램프를 사용하여 개별 위상 권선에 속하는 전선 쌍을 결정합니다(그림 2).
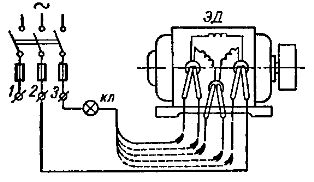
쌀. 2. 테스트 램프를 사용하여 위상 권선 결정.
모터 고정자 권선의 6개 단자 중 하나는 주전원 단자 2에 연결하고 테스트 램프의 한쪽 끝은 주전원 3의 다른 쪽 단자에 연결합니다. 램프가 켜질 때까지 고정자 권선을 차례로. 램프가 켜지면 네트워크에 연결된 두 개의 출력이 같은 위상에 속합니다.
동시에 코일 케이블이 단락되지 않도록 주의해야 합니다. 핀의 각 쌍은 표시됩니다(예: 매듭을 묶음).
고정자 권선의 단계를 결정한 후 작업의 두 번째 부분으로 진행하여 합의된 결론 또는 "시작" 및 "종료"를 결정합니다. 이 작업은 두 가지 방법으로 수행할 수 있습니다.
1. 변환 방법. 단계 중 하나에서 테스트 램프가 켜집니다. 다른 두 단계는 직렬로 연결되며 주전원을 구성합니다. 위상 전압.
이 두 단계가 한 단계의 조건부 "끝"이 지점 O에서 다른 단계의 조건부 "시작"에도 연결되는 방식으로 포함되는 것으로 밝혀지면 (그림 3, a) 자기 메모 ∑ Ф는 세 번째 코일을 교차하고 그 안에 EMF를 유도합니다.
램프는 약간의 빛과 함께 EMF의 존재를 나타냅니다. 글로우가 보이지 않으면 최대 30-60V 스케일의 전압계를 표시기로 사용해야 합니다.
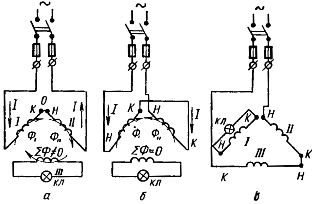
쌀. 3. 변환 방법에 의한 모터 위상 권선의 시작과 끝 결정
예를 들어 코일의 조건부 "끝"이 점 O에서 만나는 경우(그림 3, b) 코일의 자속은 서로를 향하게 됩니다. 총 플럭스는 0에 가까워지고 램프가 켜지지 않습니다(전압계에 O가 표시됨). 이 경우 단계에 속한 결론을 취소하고 다시 활성화해야 합니다.
램프가 켜지면(또는 전압계에 약간의 전압이 표시됨) 끝을 표시해야 합니다. 공통 지점 O에서 만난 결론 중 하나에 H1(I 단계의 시작)으로 표시된 레이블을 표시하고 다른 출력인 K3(또는 K2)에 표시합니다.
레이블 K1 및 H3(또는 H2)는 각각 H1 및 K3과 공통 노드(작업의 첫 번째 부분에서 연결됨)에 있는 결론에 배치됩니다.
세 번째 권선의 일치하는 결론을 결정하기 위해 그림 3, c에 표시된 회로. 램프는 이미 터미널이 표시된 단계 중 하나에서 켜집니다.
2. 상 선택 방법. 고정자 권선 위상의 일치 단자(시작 및 끝)를 결정하는 이 방법은 최대 3 - 5kW의 저전력 모터에 사용할 수 있습니다.
쌀. 4. «스타» 회로를 선택하여 권선의 «시작»과 «종료»를 결정합니다.
개별 위상의 단자가 결정되면 무작위로 스타에 연결되고(위상의 한 단자는 주전원에 연결되고 한 번에 한 단자는 공통 지점에 연결됨) 모터가 주전원에 연결됩니다. 모든 조건부 «시작» 또는 모든 «종료»가 공통 지점에 도달하면 엔진이 정상적으로 작동합니다.
그러나 단계 (III) 중 하나가 "반전"으로 판명되면 (그림 4, a) 모터가 회전 할 수 있지만 큰 소리로 윙윙 거립니다 (하지만 쉽게 멈출 수 있음). 이 경우 임의의 권선 중 하나의 결론(예: I)을 교환해야 합니다(그림 4, b).
모터가 다시 윙윙 거리고 제대로 작동하지 않으면 이전과 같이 위상을 다시 켜야하지만 (계획 a에서와 같이) 다른 위상 III을 켜야합니다 (그림 3, c).
이 후 모터가 윙윙거리면 이 위상도 이전과 같이 설정하고 다음 위상을 반전시켜야 합니다. II.
엔진이 정상적으로 작동하기 시작하면 (그림 4, c) 공통 지점에 연결된 세 개의 와이어는 모두 동일한 방식으로 표시되어야 합니다(예: "끝" 및 반대쪽 - "시작"). 그런 다음 엔진 여권에 표시된 작업 다이어그램을 조립할 수 있습니다.
