설정 및 작동 중 유도 전동기 슬립을 결정하는 방법
엔진 속도가 이전과 크게 다른 경우 동시에, 전기 모터의 샤프트에 직접 연결된 타코미터 또는 타코 제너레이터로 측정되며 모터의 슬립은 공식 S = (n1 — n2) / n1에 의해 결정됩니다. 여기서 n1 = 60f / p — 동기식 회전수; n2는 실제 속도입니다.
전기 모터의 슬립을 결정하는 이 방법의 장점: 측정 속도와 일정 속도와 가변 속도를 모두 수행할 수 있는 능력. 이 측정 방법의 단점은 기존 타코미터의 정확도가 낮고(오차 1~8%) 보정이 어렵다는 것입니다. 또한 타코미터 메커니즘의 마찰 손실이 눈에 띄는 부하를 나타내기 때문에 저전력 전기 모터를 테스트할 때 타코미터를 사용할 수 없습니다.
다양한 측정을 위해 일반적으로 롤러 끝에 배치된 다양한 모양과 용도의 교환 가능한 팁 세트와 함께 휴대용 타코미터가 제공됩니다(그림 1). 이러한 팁 중 가장 널리 사용되는 것은 금속 카트리지에 장착되는 고무 콘입니다. 이 모든 팁은 전기 기계 샤프트 끝의 뾰족한 홈에 접촉하는 데 사용됩니다. 고무 센터 팁은 고주파수에 사용되며 스틸 팁은 중저주파수에 사용됩니다.
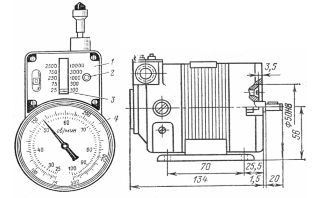 쌀. 1. 유형 IO -10 및 타코제너레이터의 원심 타코미터에 대한 일반 보기: 1 — 스케일; 2 — 스위치 버튼; 3 — 한계 표시기; 4 — 다이얼
쌀. 1. 유형 IO -10 및 타코제너레이터의 원심 타코미터에 대한 일반 보기: 1 — 스케일; 2 — 스위치 버튼; 3 — 한계 표시기; 4 — 다이얼
샤프트 중앙에 구멍이 있는 경우 타코미터 샤프트에 배치되고 해당 팁이 익스텐션에 있는 익스텐션이 사용됩니다. 센터가 없거나 부족한 경우 측면(고무링)에서 회전축의 표면으로 가압되는 롤러가 사용됩니다.
특정 측정 조건에 따라 고정물(확장 팁)을 선택합니다. 측정을 시작하기 전에 홈 중앙 또는 샤프트 표면에서 그리스, 먼지, 먼지를 제거하십시오.
전기 모터의 회전 속도를 측정하려면 먼저 타코미터의 필요한 측정 한계를 설정해야 합니다. 주파수 측정 순서를 알 수 없는 경우 회전 속도계의 손상을 방지하기 위해 가장 높은 한계에서 측정을 시작해야 합니다.
측정은 타코미터 샤프트의 축이 측정된 샤프트의 축과 일치하도록 가벼운 압력으로 회전 샤프트에 대해 회전 속도계의 팁을 조심스럽게 눌러 짧은 시간(3 ~ 5초) 동안 수행해야 합니다. 롤러를 사용하여 평행합니다.

슬립이 5%를 넘지 않으면 네온등을 이용한 스트로보스코프 방식으로 속도를 측정할 수 있다.
분필로 모터 축 끝에 직경 선을 그립니다. 엔진이 작동하는 동안 엔진과 동일한 주파수의 네트워크로 구동되는 네온 램프가 켜집니다. 관찰자는 샤프트의 끝에서 선이 아니라 샤프트의 회전 방향에 대해 천천히 회전하는 별을 봅니다. 별의 광선 수는 모터의 극 수와 네온 램프의 위치에 따라 다릅니다. 램프의 양 전극에서 나오는 빛이 축 끝에 닿으면 보이는 별의 광선 수는 2p이고, 분필선이 있는 축 끝에 한 전극만 비추면 별의 광선 수는 보이는 별은 극의 수와 같습니다.
스톱워치로 측정한 시간 t(보통 30초) 동안 수직 위치를 통과하는 눈에 보이는 별 m의 광선 수가 계산됩니다. 보이는 별의 광선의 수는 2p이므로 슬립
여기서 f1은 네온 램프 공급 네트워크의 주파수입니다.
f1 = 50Hz에서.
스트로보스코프 방법의 또 다른 변형은 다음과 같습니다. 디스크 중 하나는 전면에서 모터 샤프트에 고정됩니다(그림 2). 체인을 조립합니다(그림 3). 바이폴라 기계에서 2p = 2라고 표시된 디스크가 샤프트에 고정되고 패치 전극이 있는 네온 램프로 조명됩니다.

쌀. 2… 유도전동기 극수에 따른 스트로보스코프 이미지
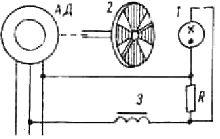
쌀. 3… 스트로보스코프 슬립 감지 방법을 위한 네온 램프 전환 방식: 1 — 네온 램프, 2 — 스트로보 디스크, 3 — 유도 코일
로터는 비동기식으로 회전하고 필드 뒤에서 지연되므로 디스크가 로터 회전의 반대 방향으로 천천히 회전하는 것이 보입니다.시간 tm 동안 블랙 섹터가 고정점(베어링에 고정된 화살표)을 통과하면 슬립 값은 다음 식으로 제공됩니다.
고정된 지점을 통과하는 구간의 계산은 스톱워치가 시작되는 순간부터 시작해서는 안 되며 다음 표시 교차점부터 시작해야 합니다.
선명한 이미지를 얻으려면 램프에 전압을 가해야 하며 그 곡선은 그림 1과 같습니다. 4… 단자의 전압이 점화 임계 값에 도달하면 램프가 켜집니다.
쌀. 4... 날카로운 전압의 파형을 얻기 위해 네온 램프를 켜는 회로도: 1 — 네온 램프; 2 - 유도 저항 X가 있는 고도로 포화된 자기 회로가 있는 반응성 코일(저항 R과 X의 전압 강하는 거의 동일함)
유도 코일을 사용한 모터 슬립 결정. 이 방법은 슬립에 비례하는 주파수로 유도 코일의 권선을 가로지르는 회전자 Fr(그림 5)의 분산 플럭스의 회전 주파수 모니터링을 기반으로 합니다.
쌀. 5. 유도 코일을 이용한 비동기 전동기의 회전자 슬립 측정 방식
민감한 밀리볼트미터(가급적이면 눈금 중앙에 0이 있음)가 코일의 단자에 연결됩니다. 코일은 로터 샤프트의 끝에 있습니다. 코일을 다른 방향으로 돌려 계기 화살표의 최대 진동이 관찰되는 위치를 찾습니다. 시간 t에서의 완전한 진동 수 k에서 슬립 값이 계산됩니다.

그리고 f = 50Hz에서.

계산을 위해 50번의 완전한 진동을 세고 스톱워치를 사용하여 시간을 기록하는 것이 편리합니다. 그 다음에: .
유도 코일로 릴레이 코일 또는 DC 접촉기를 10-20,000회 사용할 수 있습니다(또는 코일을 3000회 이상 감음). 자속을 증가시키기 위해 여러 개의 변압기 강판으로 만든 코어가 코일에 삽입됩니다. 유도 코일 방법은 매우 간단하고 모든 유형의 기계에 적합합니다.
권선 회 전자가있는 비동기식 모터에서는 위에서 설명한 방법 외에도 회 전자 위상 중 하나에 연결된 자기 전기 전류계를 사용하고 회 전자 회로에 비 스위칭 저항이있는 경우 연결된 전압계를 사용하여 슬립을 결정할 수 있습니다 로터 링에. 양면 눈금이 있는 기구를 사용하는 것이 좋습니다. 유도 전동기의 슬립은 유도 코일 방식을 사용할 때와 마찬가지로 장치 바늘의 완전한 진동 수에서 계산됩니다.
